6.1 Parameter
B6-11
ME0384-4A
[Servo Gain Number (Parameter No. 7)]
No. Name Unit Input range
Default initial value setting
7 Servo gain number - 0 to 31 In accordance with actuator
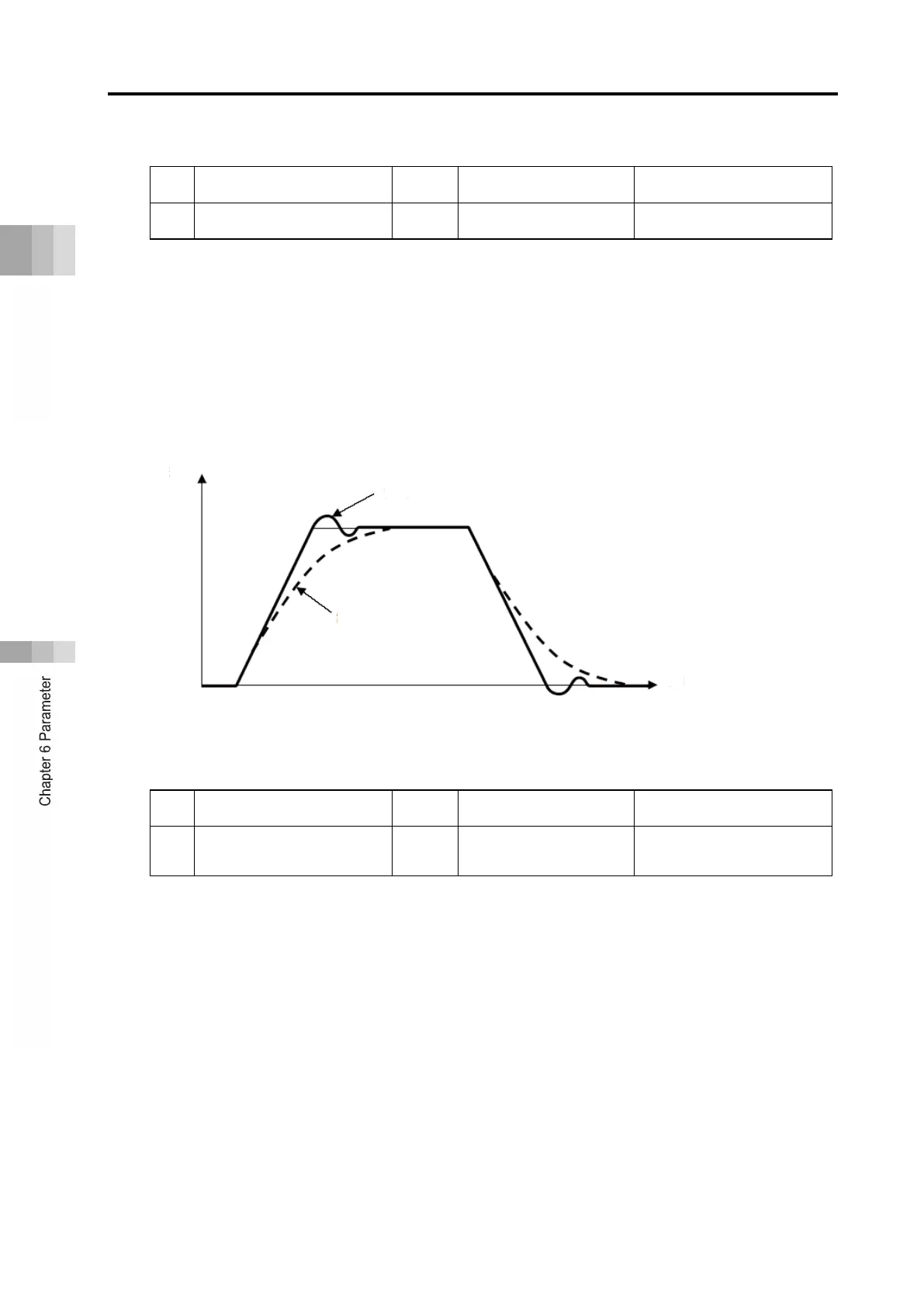
Called position loop gain, position control system proportional gain, etc., this is the parameter
that sets the response of the position control loop. The increased set value improves tracking of
position command. If it is too high, overshoot may occur.
If the setting value is low, tracking performance with respect to the position command becomes
worse, and positioning takes time.
In systems with low mechanical rigidity and systems with low natural frequency, mechanical
resonance occurs when the setting value is increased, and this may cause not only vibration
and noise, but also overload malfunctions.
[Velocity Initial Value (Parameter No. 8)]
No. Name Unit Input range
Default initial value setting
8 Velocity initial value
mm/s
(deg/s)
1 ~ Actuator maximum
speed
Actuator rated speed
The actuator rated speed is set at shipment.
This value will be written automatically in the speed field of the applicable position No. when
target position is written in an unregistered position table.
Enter frequently used values for convenience.
value is low
When the setting value is high (overshoot)
 Loading...
Loading...





