6.1 Parameter
B6-20
ME0384-4A
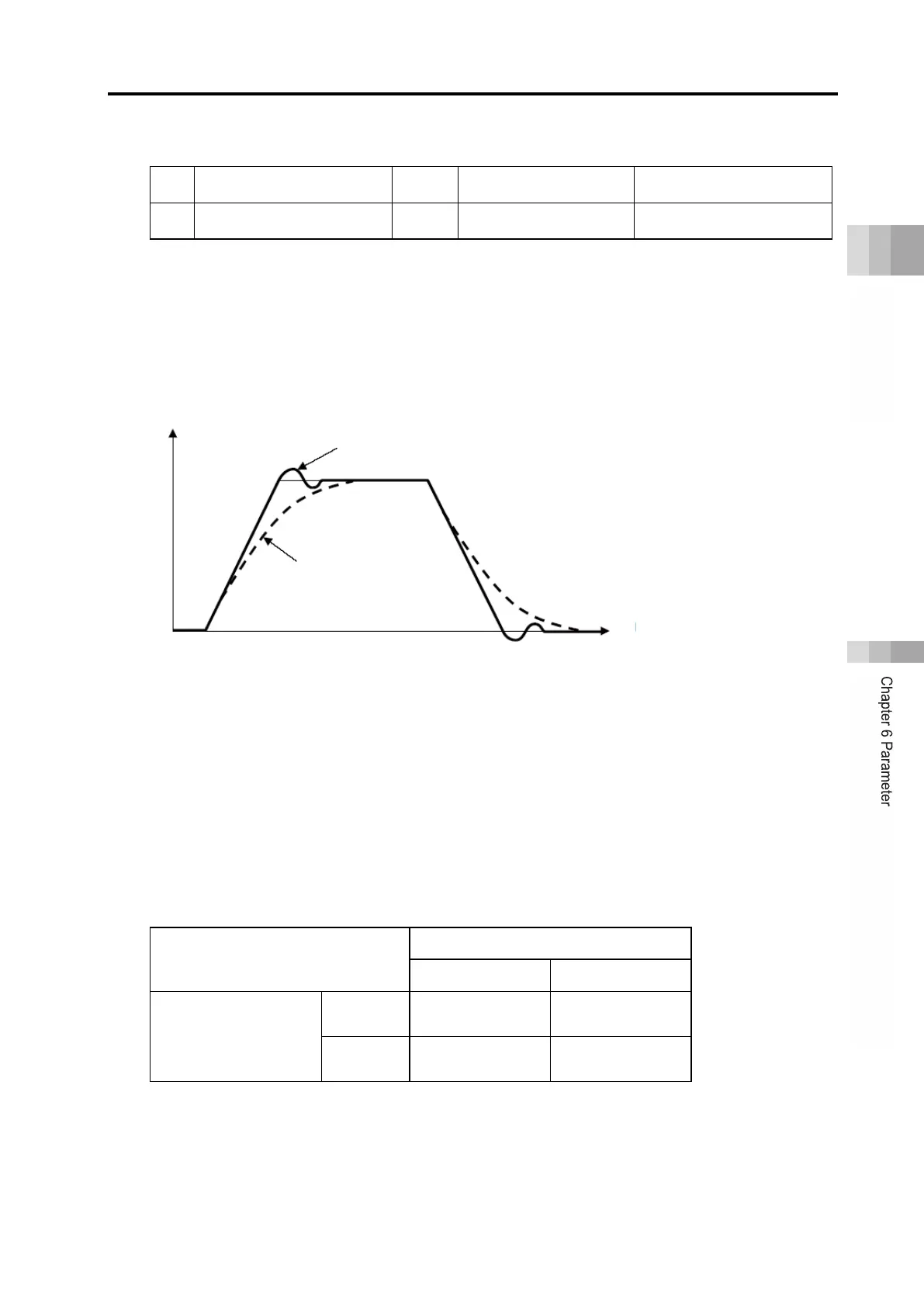
[Velocity Loop Integral Gain (Parameter No. 32)]
No. Name Unit Input range
Default initial value setting
32 Velocity loop integral gain - 1 to 99,999,999 In accordance with actuator
Machines have friction. "Velocity Loop Integral Gain" is the parameter which corresponds to
deviation caused by external factors, such as friction. The increased set value improves the
repulsive force against load fluctuation.
If it is too high, overshoot and oscillation, as well as vibration in the mechanical system may
occur.
Adjust appropriately while observing the response.
For the conditions for using this item in the stepper motor specification, refer to [Selection and
use of Velocity Loop Proportional Gain and Velocity Loop Integral Gain] below.
[Selection and use of Velocity Loop Proportional Gain and Velocity Loop Integral Gain]
Each of the 3 parameters - No. 31, 145, and 153 for Velocity Loop Proportional Gain and
Parameters No. 32, 146, and 154 for Velocity Loop Integral Gain - of the stepper motor
specification can be set, but only 1 of them will be enabled at the time of operation.
The conditions for selecting which parameter No. setting value is enabled are shown below.
Enabled Parameter No.
High Output Setting (Parameter No.152)
0 (Disabled) 1 (Enabled)
Gain
scheduling
(Parameter No.144)
~ 100
(Disabled)
Parameters
No.31, 32
Parameters
No.153, 154
101 ~
(Enabled)
Parameters
No.145, 146
Parameters
No.145, 146
When the setting value is high (overshoot)
value is low
 Loading...
Loading...





