6.1 Parameter
B6-38
ME0384-4A
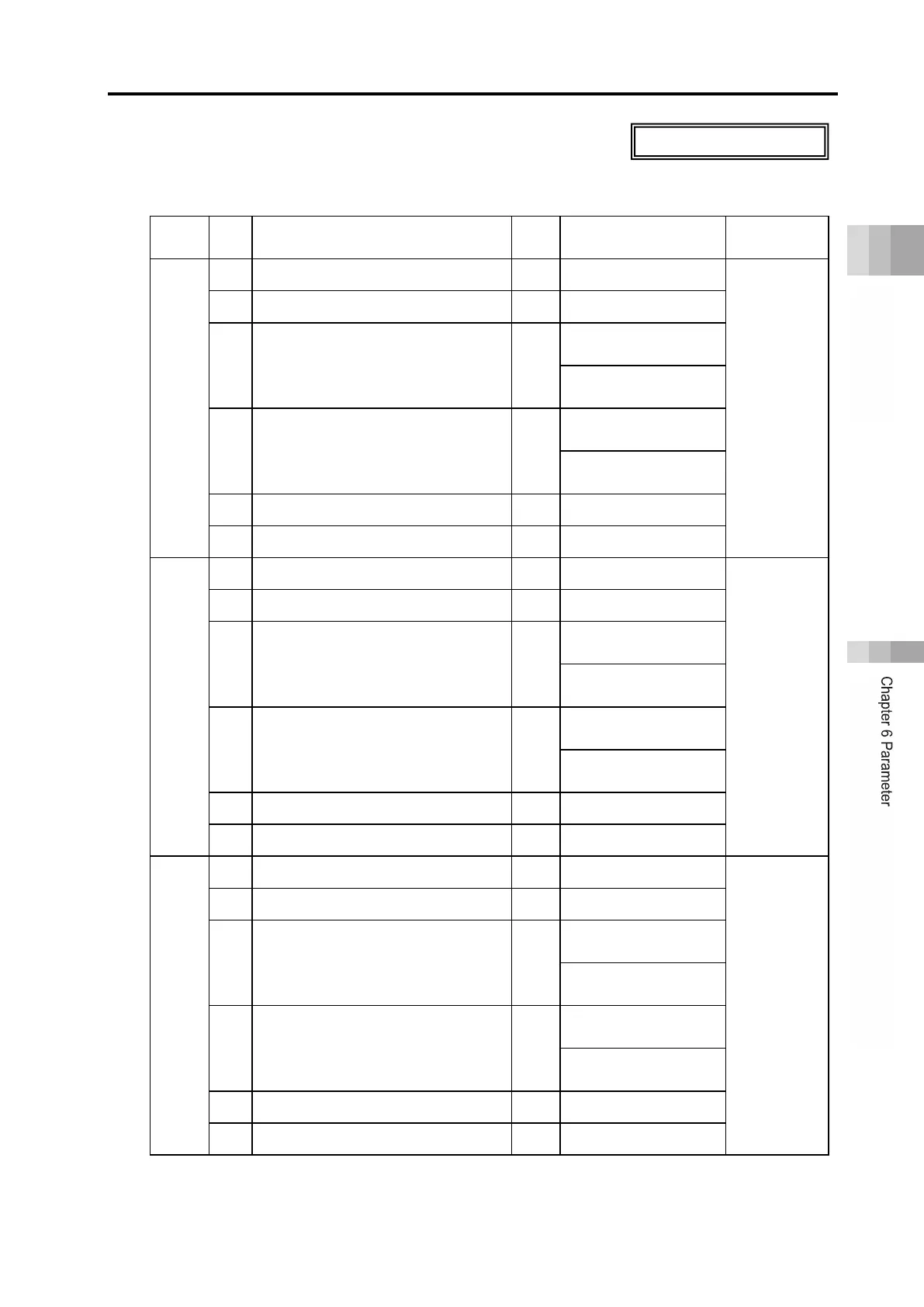
[Servo Gain Number / Positional Feedforward Gain / Velocity Loop Proportional Gain / Velocity Loop
Integral Gain / Torque Filter Constant / Current Control Width Number (Parameters No. 120 to 137)]
No. Name Unit
Input range
Default initial
value setting
Gain
set 1
120 Servo gain number 1
0 to 31
with actuator
121 Positional feedforward gain 1 - 0 to 100
122 Velocity loop proportional gain 1 -
1 to 27,661
(24V AC servo motor specification)
1 to 99,999,999
(200V AC servo motor specification)
123 Velocity loop integral gain 1 -
1 to 217,270
(24V AC servo motor specification)
1 to 99,999,999
(200V AC servo motor specification)
124 Torque filter constant 1
0 to 2,500
125 Current control width number 1
0 to 15
Gain
set 2
126 Servo gain number 2 - 0 to 31
with actuator
127 Positional feedforward gain 2
0 to 100
128 Velocity loop proportional gain 2 -
1 to 27,661
(24V AC servo motor specification)
1 to 99,999,999
(200V AC servo motor specification)
129 Velocity loop integral gain 2 -
1 to 217,270
(24V AC servo motor specification)
1 to 99,999,999
(200V AC servo motor specification)
130 Torque filter constant 2 - 0 to 2,500
131 Current control width number 2
0 to 15
Gain
set 3
132 Servo gain number 3 - 0 to 31
with actuator
133 Positional feedforward gain 3 - 0 to 100
134 Velocity loop proportional gain 3 -
1 to 27,661
(24V AC servo motor specification)
1 to 99,999,999
(200V AC servo motor specification)
135 Velocity loop integral gain 3 -
1 to 217,270
(24V AC servo motor specification)
1 to 99,999,999
(200V AC servo motor specification)
136 Torque filter constant 3
0 to 2,500
137 Current control width number 3 - 0 to 15
AC servo motor specification only
 Loading...
Loading...





