6.1 Parameter
B6-64
ME0384-4A
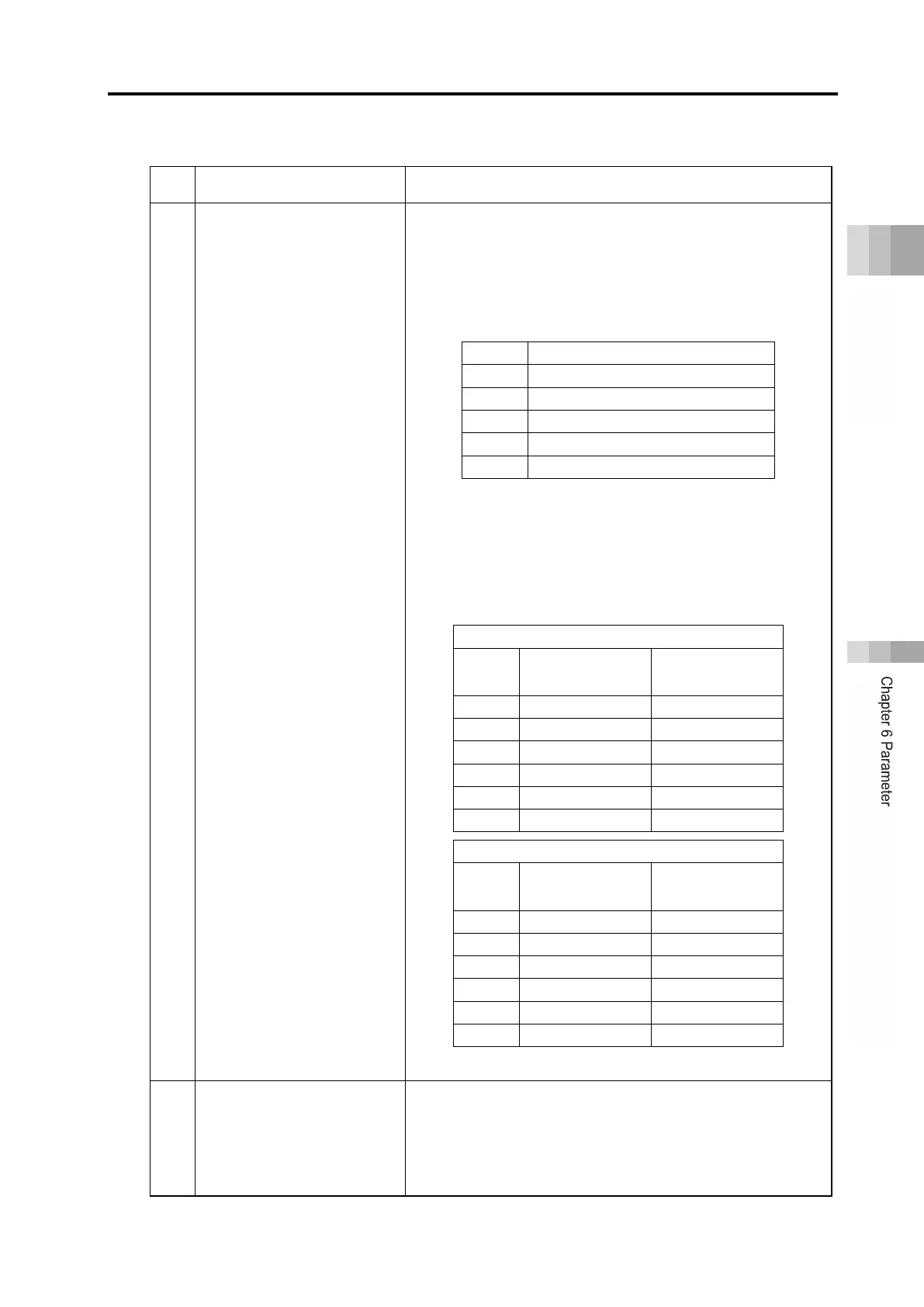
Adjustment of DC brush-less motor
No. Problems Adjustment method
1
Hunting occurs when
positioning stops
•
Speed irregularity occurs
during travel
• Speed accuracy is
insufficient
Set the parameters following the procedure below and check the
operation.
When the motion improves, end the adjustment. There is
no need to proceed to the next step.
Step 1:
Change Parameter No. 32 "Velocity Loop Integral Gain",
set the following 5 values in order and check the operation.
If the operation does not improve, perform step 2.
Velocity loop integral gain setting value
1 411
2 592
4 1,645
5 3,700
Step 2: Change Parameter No. 31 "Velocity Loop
Proportional Gain" and Parameter No. 32 "Velocity
Loop Integral Gain"
Set the following 6 values in order and check the
● Load is 0.2 kg or less
Setting order
Velocity loop proportional
gain setting value
integral
2 42 520
4 42 1,171
5 42 2,081
If the operation does not improve, contact IAI.
● Load is heavier than 0.2 kg
Setting order
Velocity loop proportional
gain setting value
integral
2 Abnormal noise
In particular, high-pitched
noise occurs when stopping
or at low speed (20 mm/s
)
Change Parameter No. 31 "Velocity Loop Proportional
Gain" and Parameter No. 32 "Velocity Loop Integral Gain"
to the following values and confirm.
Velocity Loop Proportional Gain: 32
Velocity Loop Integral Gain: 231

 Loading...
Loading...




