22.Run Tab
The Run tab allows you to simply operate the robot arm and control box, using as few buttons and
options as possible. You can combine simple operation with password protecting the
programming part of PolyScope (see29.3. Settingson page259), to make the robot into a tool that
can run exclusively pre-written programs.
On this screen you can automatically load and start default a program based on an external input
signal edge transition (see24.7. Startupon page215).
The combination of auto loading and starting of a default program and auto initialization on power
up can be used to integrate the robot arm into other machinery.
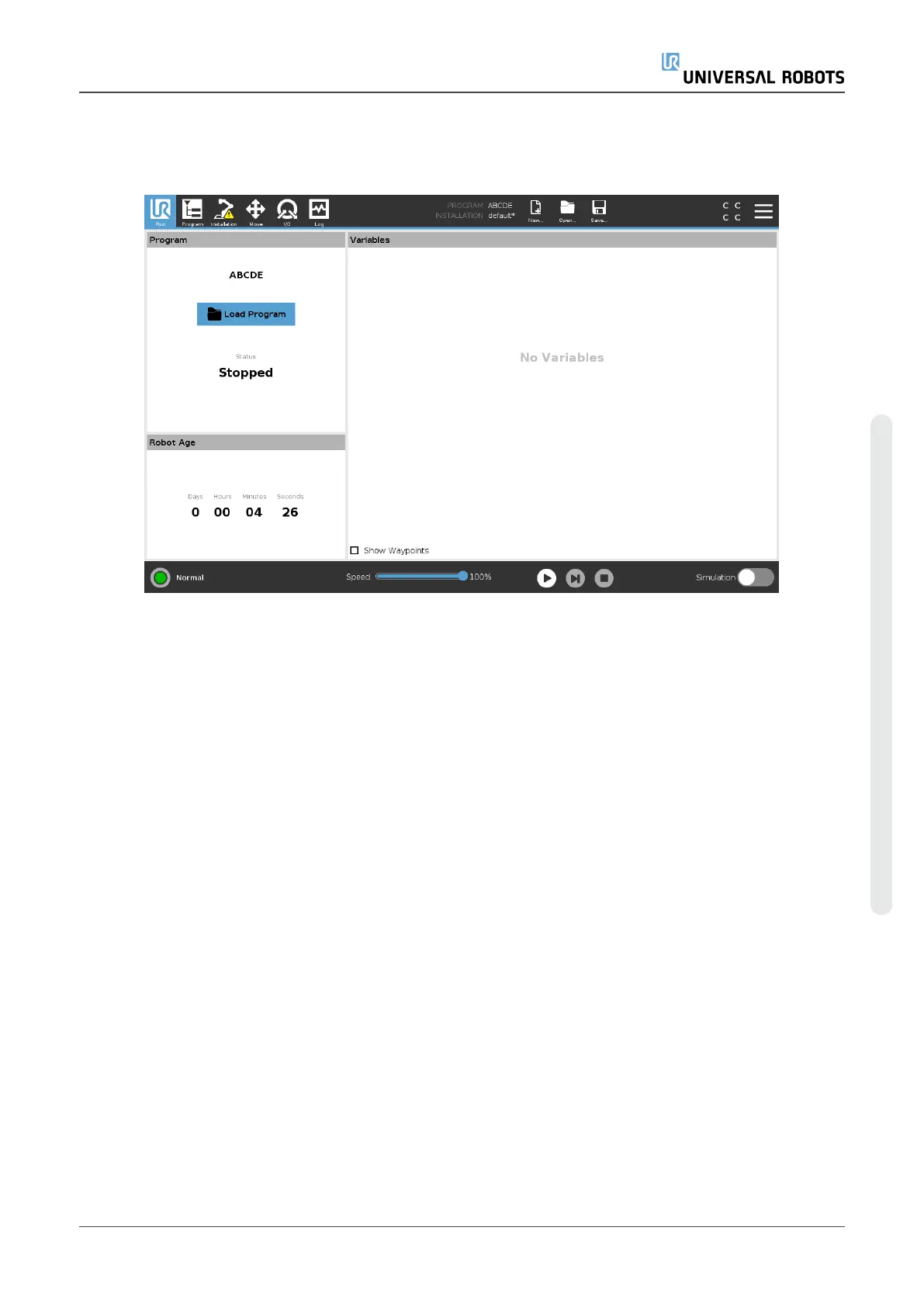
22.1. Program
The Program field, displays the name of the program that was loaded on to the robot and its
current status. You can tap the Load Program tab to load a different program.
22.2. Variables
A robot program can make use of variables to store and update various values during runtime. Two
kinds of variables are available:
Installation variables
These can be used by multiple programs and their names and values are persisted together
with the robot installation (see24.6. Installation Variableson page214). Installation variables
keep their value after the robot and control box has been rebooted.
Regular program variables
User Manual 139 UR5e
22.Run Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












