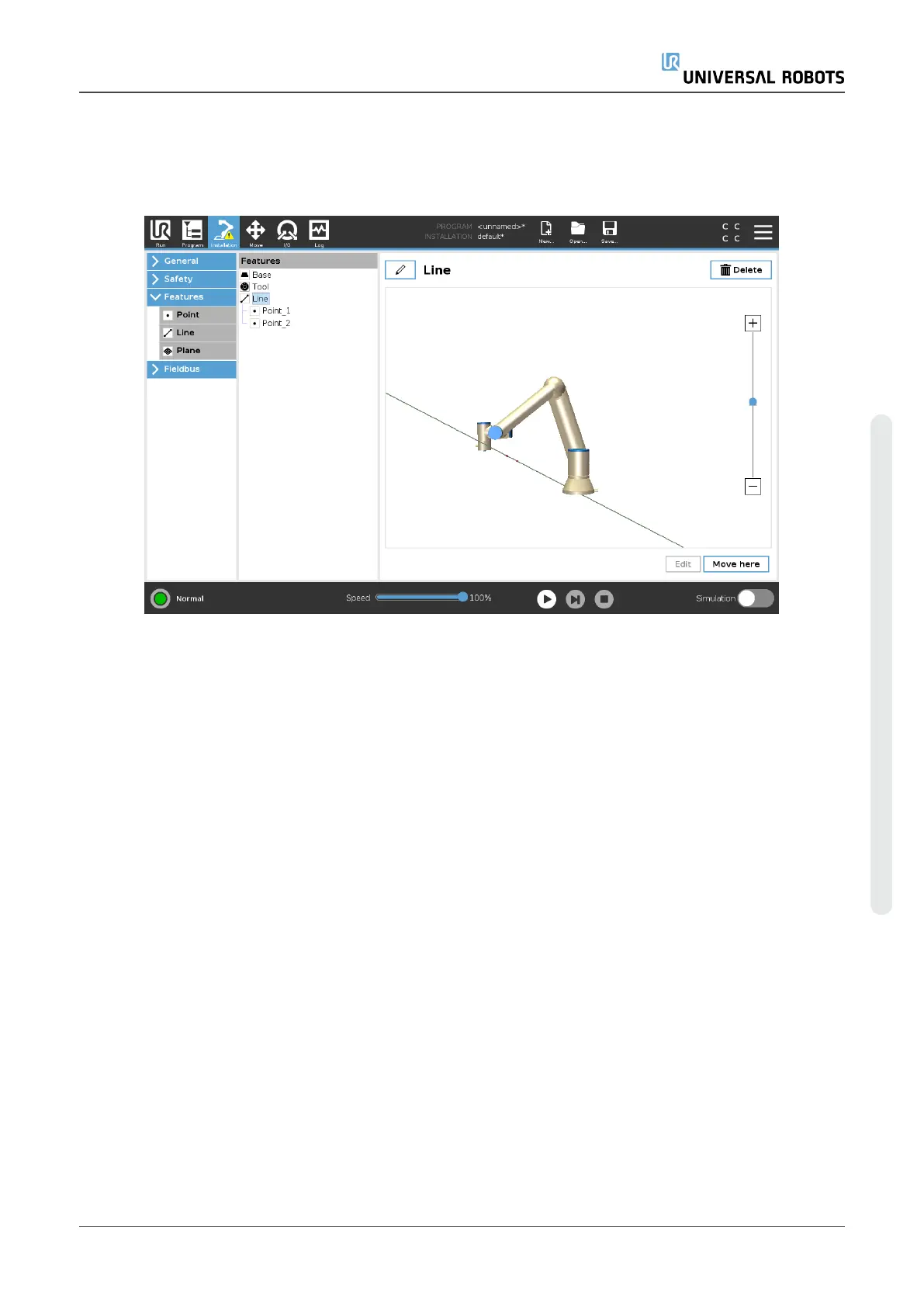
In figure 13.3 the axis directed from the first point towards the second point, constitutes the y-axis
of the line coordinate system. The z-axis is defined by the projection of the z-axis of p1 onto the
plane perpendicular to the line. The position of the line coordinate system is the same as the
position of p1.
24.17.5. Plane Feature
Select the plane feature when you need a frame with high precision: e.g., when working with a
vision system or doing movements relative to a table.
Adding a plane
1. In Installation, select Features.
2. Under Features select Plane.
Teaching a plane
When you press the plane button to create a new plane, the on-screen guide assists you creating a
plane.
1. Select Origo
2. Move robot to define the direction of the positive x-axis of the plane
3. Move robot to define the direction of the positive y-axis of the plane
The plane is defined using the right hand rule so the z- axis is the cross product of the x-axis and
the y-axis, as illustrated below.
User Manual 227 UR5e
24.Installation Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












