11.Stopping Time and Stopping Distance
NOTE
You can set user-defined safety rated maximum stopping time and distance. See
3.1. Introductionon page17 and 21.6. Safety Menu Settingson page121.
If user-defined settings are used, the program speed is dynamically adjusted to
always comply with the selected limits.
The graphical data provided for Joint 0 (base), Joint 1 (shoulder) and Joint 2 (elbow) is valid for
stopping distance and stopping time:
•
Category 0
•
Category 1
•
Category 2
The Joint 0 test was carried out by performing a horizontal movement, where the rotational axis
was perpendicular to the ground.
During the Joint 1 and Joint 2 tests, the robot followed a vertical trajectory, where the rotational
axes were parallel to the ground, and the stop was performed while the robot was moving
downward.
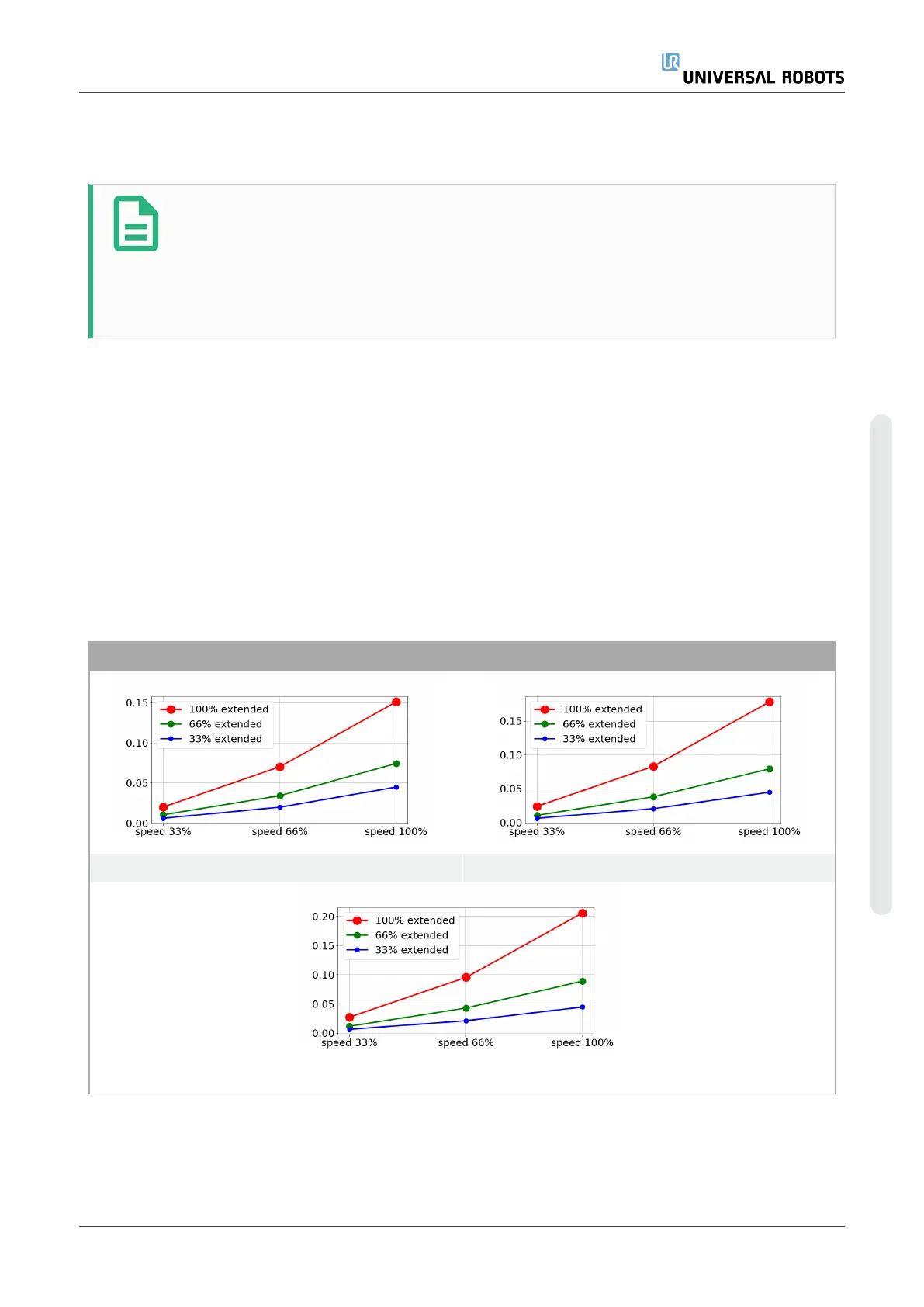
Stopping distance for joint 0 (BASE)
Stopping distance in meters for 33% of 5kg Stopping distance in meters for 66% of 5kg
Stopping distance in meters for maximum payload of 5kg
User Manual 65 UR5e
11.Stopping Time and Stopping Distance
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












