NOTE
If there is a Conveyor Tracking node inside an If, ElseIf or Loop, and the Check
Expression Continuously option is selected, you can add an end_
conveyor_tracking() script at the end of the expression to exit conveyor
tracking.
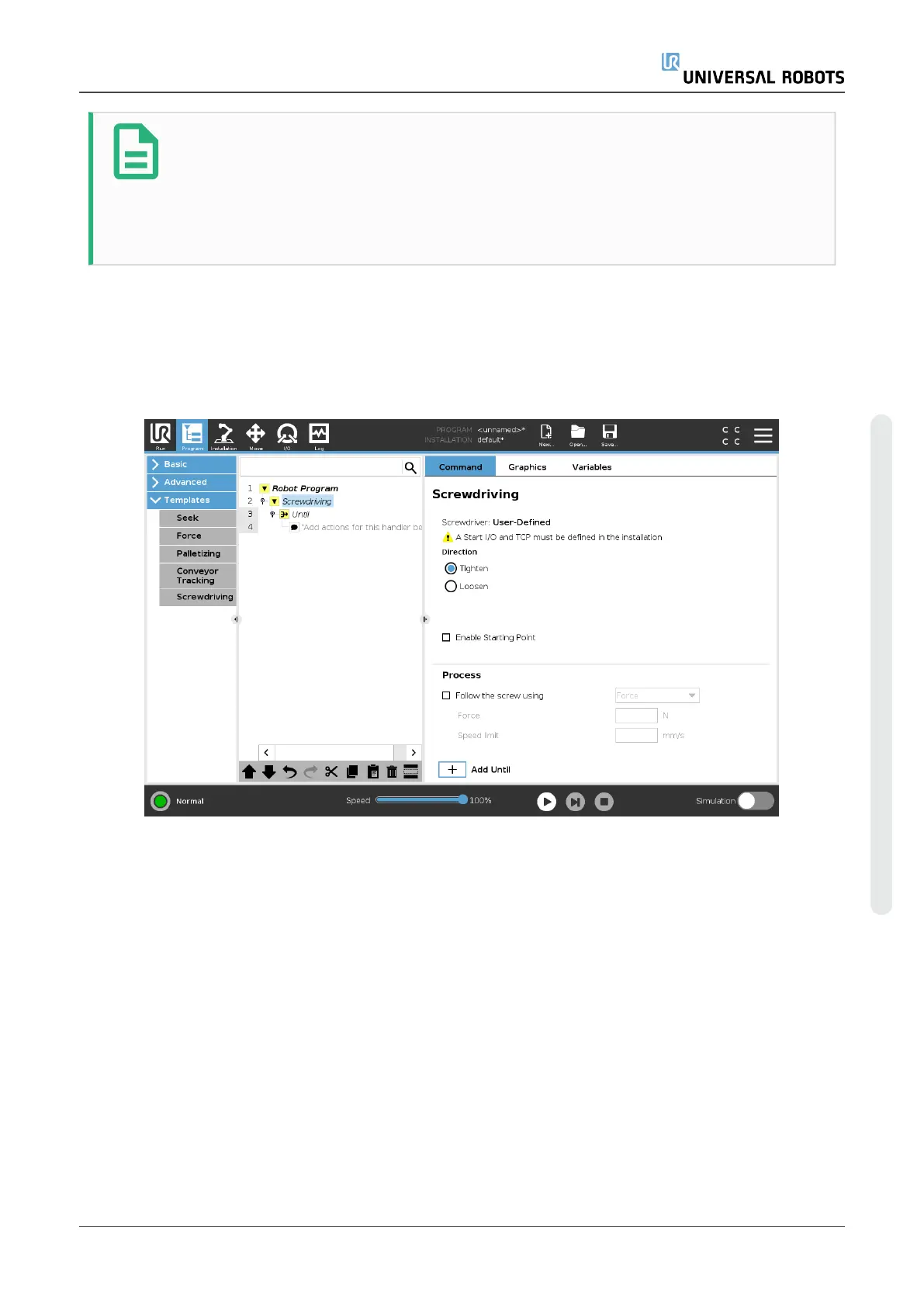
23.13.8. Screwdriving
The Screwdriving program node provides an easy way to add a screwdriving application for an
attached screwdriver. Configuring the screwdriver and its connections to the robot is defined in the
Installation Tab (see24.1. Generalon page205).
Adding a Screwdriving Node
1. In the Header, tap Program.
2. Under Templates, tap Screwdriving.
3. Select Tighten to follow the screw in a tightening direction (in), or select Loosen to follow the
screw in a loosening direction (out). This selection only impacts the motion of the robot to
follow the screw and its measuring calculations.
4. In the Program Selection field, you can select a screwdriver program, depending on the
Program Selection signals in the Installation.
5. Select Enable Starting Point, to add a MoveL to the Program Tree that is executed when the
screwdriver is already running.
User Manual 191 UR5e
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












