The movement relative to P1 is repeated a number of times, each time by an offset o. In this
example the offset is set to 10 cm in the Y-direction (see figure 13.6, offsets O1 and O2). This is
achieved using pose_add() or pose_trans() script functions to manipulate the variable. It is possible
to switch to a different feature while the program is running instead of adding an offset. This is
shown in the example below (see figure 13.7) where the reference feature for the MoveL command
P1_var can switch between two planes P1 and P2.
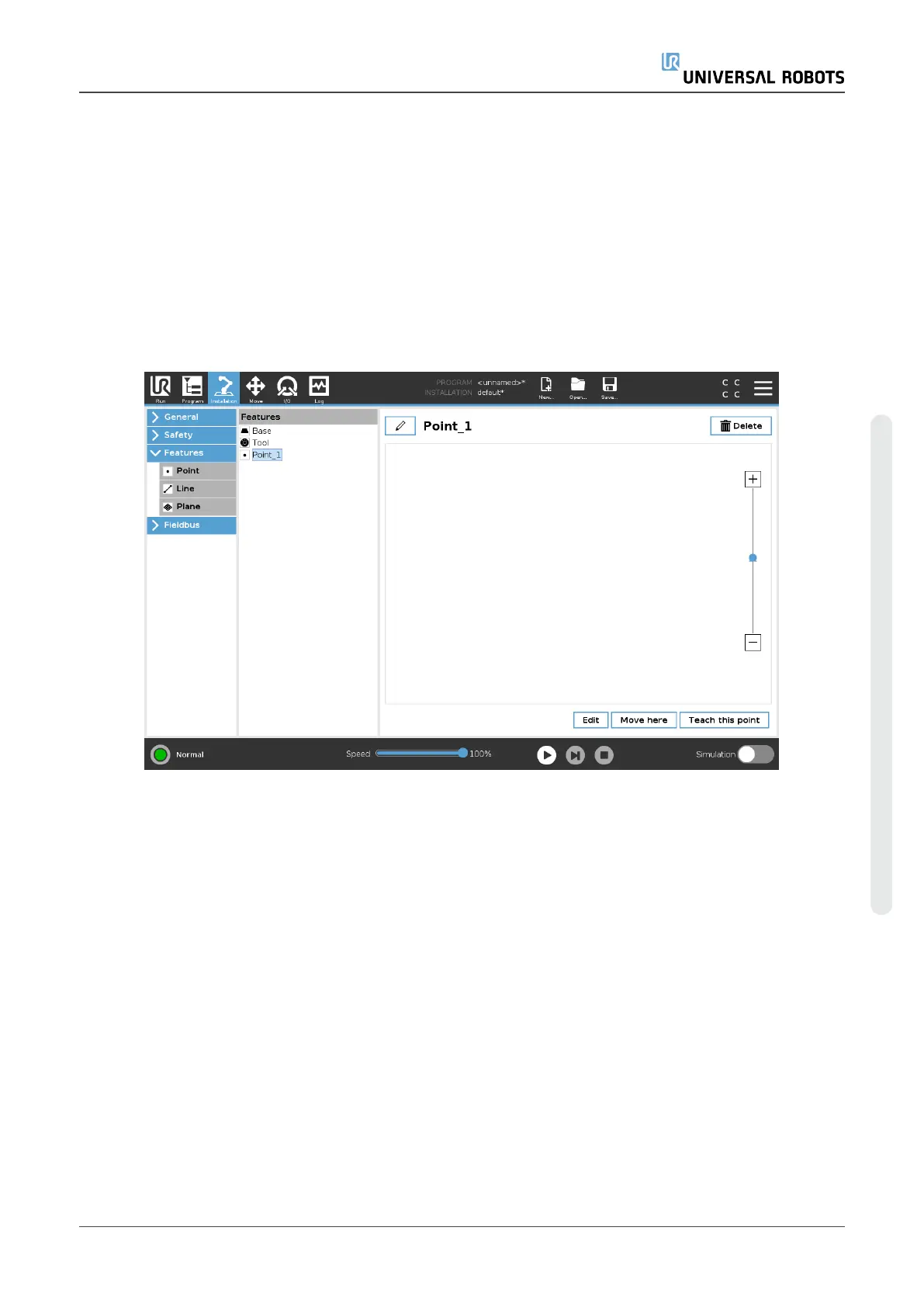
24.17.8. Feature Edit
The Feature Edit is an alternative way to add features to your installation and/or edit existing
features.
Use Edit to place and move features without moving the robot arm, so the feature can be placed
outside of the robot arm's reach.
Editing a Point
You can edit a defined point or an undefined point. Editing an undefined point defines it.
User Manual 231 UR5e
24.Installation Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












