6.8.6. Tool Analog Input
Tool Analog Input are nondifferential and can be set to either voltage (0-10V) or current
(4-20mA) on the I/O tab (see partPart II PolyScope Manualon page97). The electrical
specifications are shown below.
Parameter Min Type Max Unit
Input voltage in voltage mode -0.5 - 26 V
Input resistance @ range 0V to 10V - 10.7 - kΩ
Resolution - 12 - bit
Input voltage in current mode -0.5 - 5.0 V
Input current in current mode -2.5 - 25 mA
Input resistance @ range 4mA to 20mA - 182 188 Ω
Resolution - 12 - bit
Two examples of using Analog Input are shown in the following subsections.
CAUTION
1. Analog Inputs are not protected against overvoltage in current
mode. Exceeding the limit in the electrical specification can cause
permanent damage to the input.
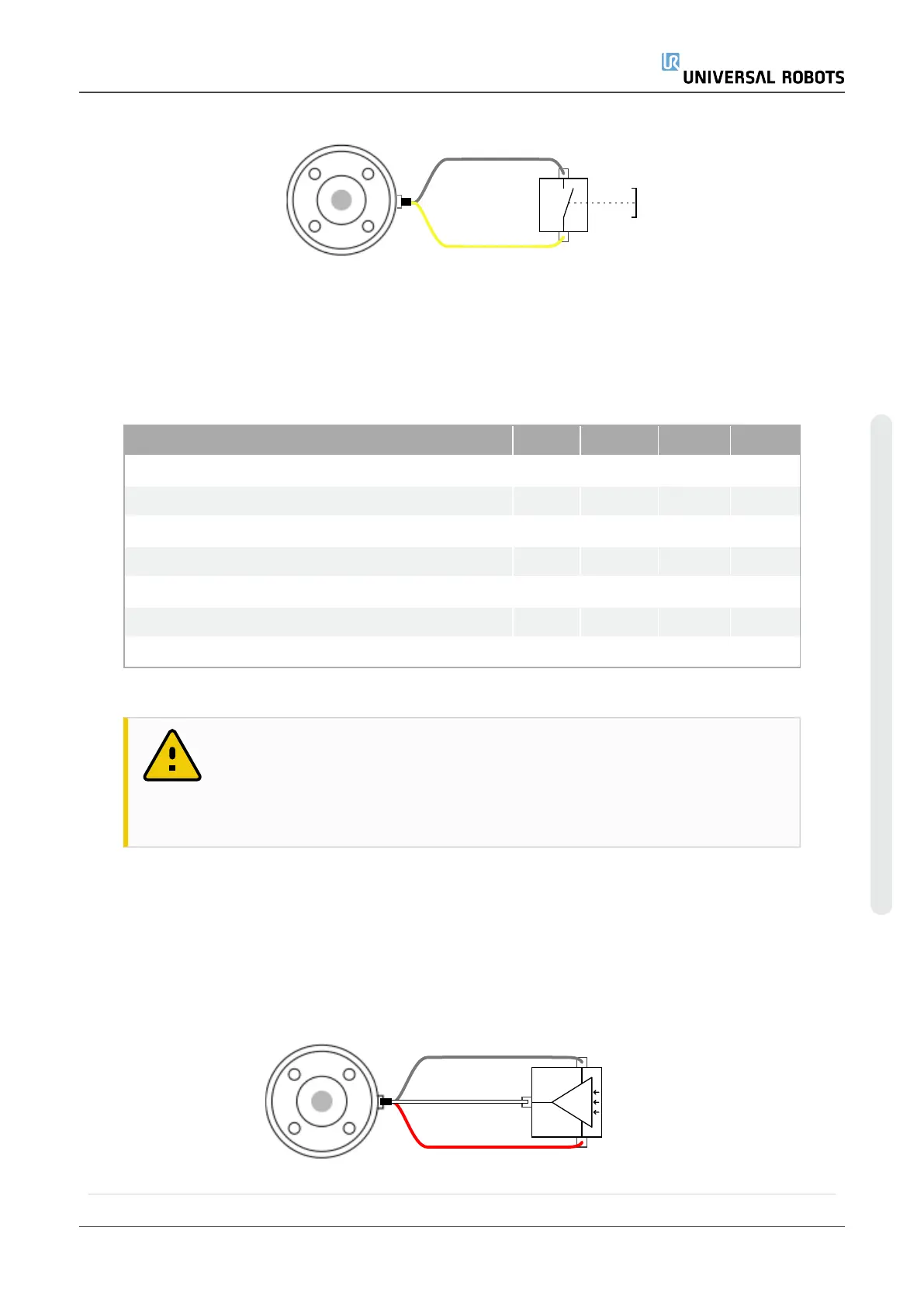
Using Tool Analog Inputs, Nondifferential
This example shows an analog sensor connection with a nondifferential output. The
sensor output can be either current or voltage, as long as the input mode of that Analog
Input is set to the same on the I/O tab.
Note: You can check that a sensor with voltage output can drive the internal resistance of
the tool, or the measurement might be invalid.
User Manual 53 UR5e
6.Electrical Interface
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












