Retract to Contact
Use the Retract to Contact setting for the robot to return to the initial point of contact. You can set
an additional reverse movement to make the robot move free of, or toward, contact. This is useful
if you have a gripper that needs free space to move, or if a clamping action is needed.
Action
Add an Action allows a program node to be be added if a specific Until condition is met. For
example, Until Tool Contact can engage the gripping action of a gripper tool. If no Action is defined,
then program execution continues to the next program node in the Program Tree.
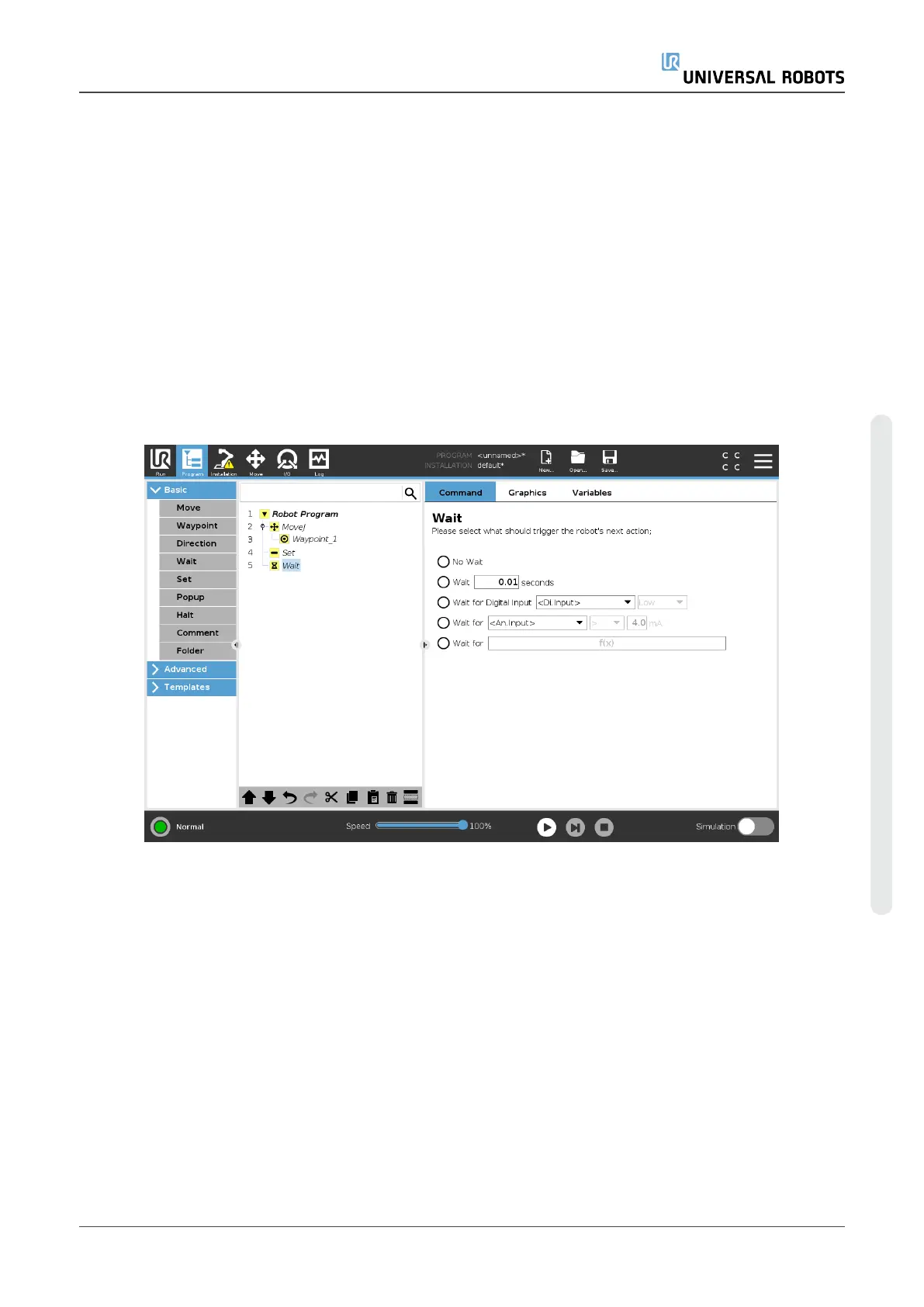
23.11.8. Wait
Wait pauses I/O signal, or expression, for a given amount of time. If No Wait is selected, nothing is
done.
When the Tool Communication Interface TCI is enabled, the tool analog input is unavailable for
Wait For selection and expressions.
User Manual 165 UR5e
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












