23.11.6. Until
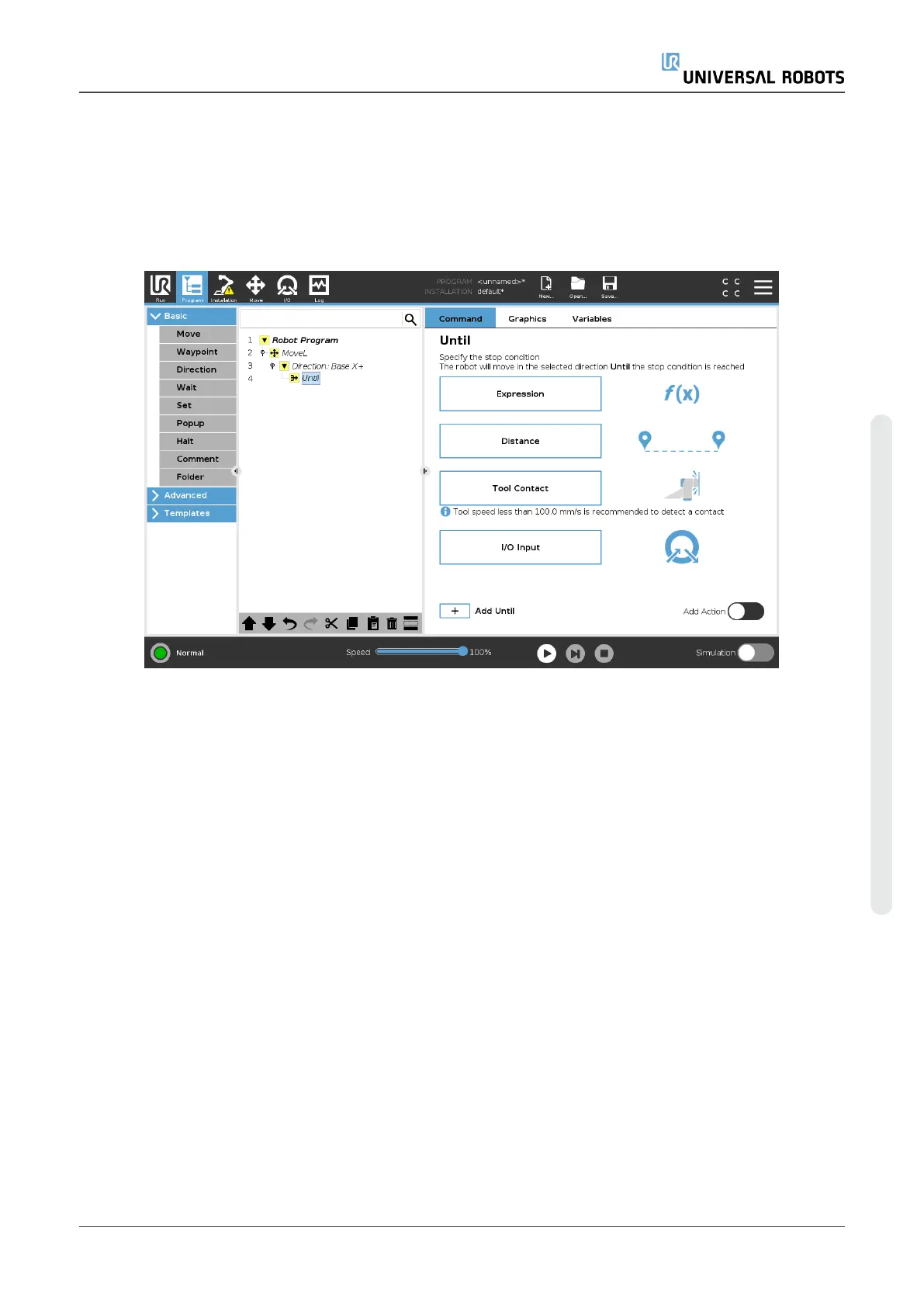
The program node Until defines a stop criterion for a motion. The robot moves along a path and
stops when contact is detected. In the Progran Tree, you can add Until Nodes under Direction
Nodes and Waypoint Nodes. You can add several stop criteria to a single movement. The motion
stops when the first Until condition is met.
In the Until field, you can define the following stop criteria:
•
Distance This node can be used to stop a Direction move when the robot has moved a
certain distance. The velocity is ramped down so the robot stops exactly at the distance.
•
Tool Contact (see23.11.7. Until-Tool Contactbelow) You can use this node to stop a
movement when the robot tool detects a contact.
•
Expression This node can be used to stop the motion due to a custom program expression.
You can use I/Os, variables or script functions to specify the stop condition.
•
I/O Input You can use this node to stop a signal controlled motion on an I/O Input.
23.11.7. Until-Tool Contact
The program node Until Tool Contact allows the robot to stop its motion when contact with the
tool is established. You can define the deceleration of the stop and the retraction of the tool.
User Manual 163 UR5e
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












