CAUTION
The default speed of motion is too high for contact detection. A faster speed of
motion triggers a Protective Stop, before the Tool Contact condition can take
effect. To avoid triggering a Protective Stop, lower the speed of motion. For
example: 100m/s.
NOTE
Until Tool Contact might not work if the mounted tool vibrates. For example: a
vaccuum gripper with an embedded pump can introduce fast vibrations.
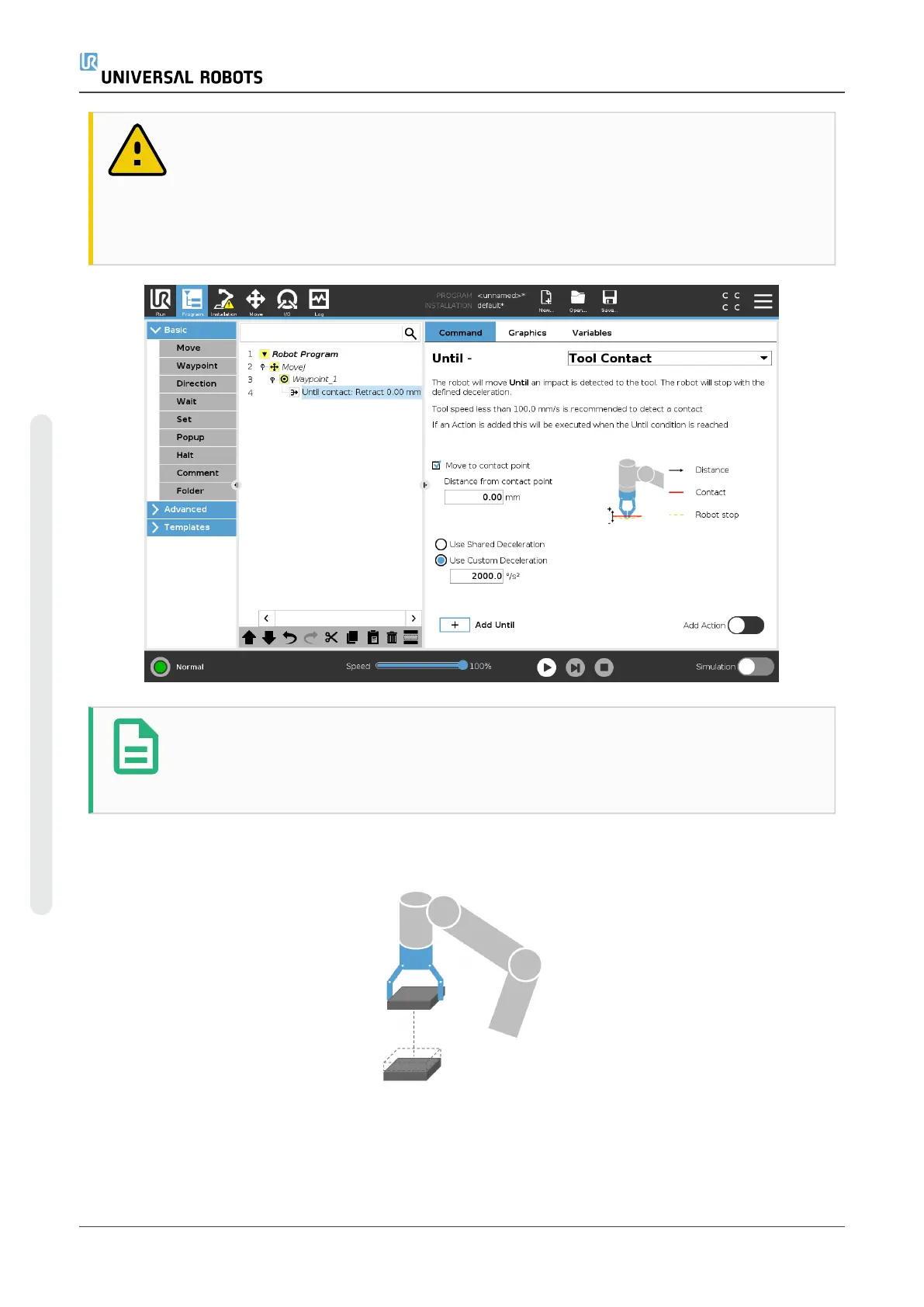
You can use the Until Tool Contact Node for applications like Stacking/Destacking, where Until
Tool Contact determines the height of stacked objects.
UR5e 164 User Manual
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












