24.Installation Tab
24.1. General
The Installation Tab allows you to configure the settings which affect the overall performance of
the robot and PolyScope.
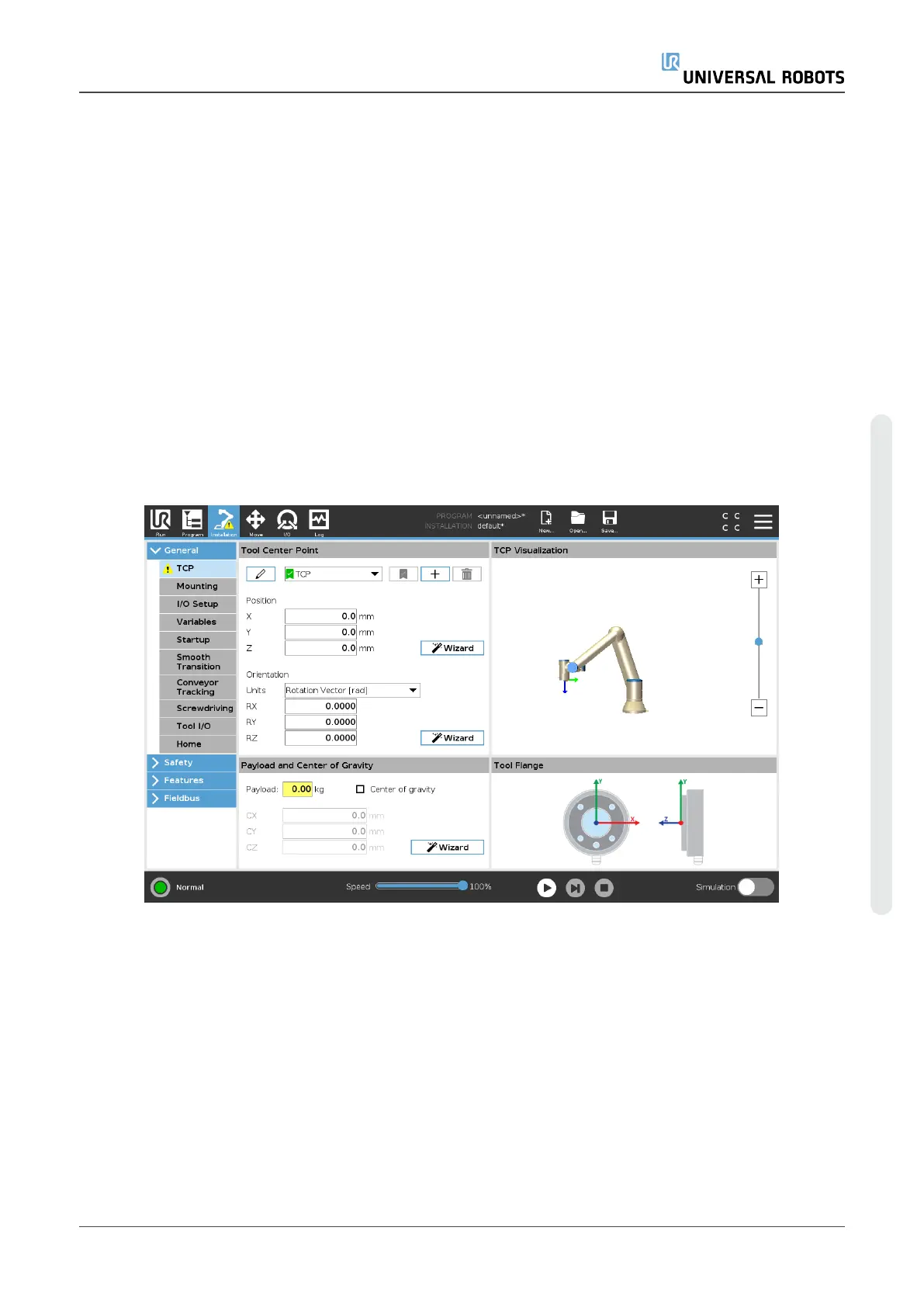
24.2. TCP Configuration
A Tool Center Point (TCP) is a point on the robot’s tool. Each TCP contains a translation and a
rotation relative to the center of the tool output flange.
When programmed to return to a previously stored waypoint, a robot moves the TCP to the position
and orientation saved within the waypoint. When programmed for linear motion, the TCP moves
linearly.
24.2.1. Position
The X, Y, Z coordinates specify the TCP position. When all values (including orientation) are zero,
the TCP coincides with the center point of the tool output flange and adopts the coordinate system
depicted on the screen.
24.2.2. Orientation
The RX, RY, RZ coordinate boxes specify the TCP orientation. Similar to the Move Tab, use the
Units drop down menu above the RX, RY, RZ boxes to select the orientation coordinates (see ).
User Manual 205 UR5e
24.Installation Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












