24.15. Screwdriving Setup
The Screwdriving Setup provides options for configuring the robot to work with an industrial
screwdriver or an industrial nutrunner. You can setup the screwdriver’s position with respect to the
robot’s tool flange and electrical interface.
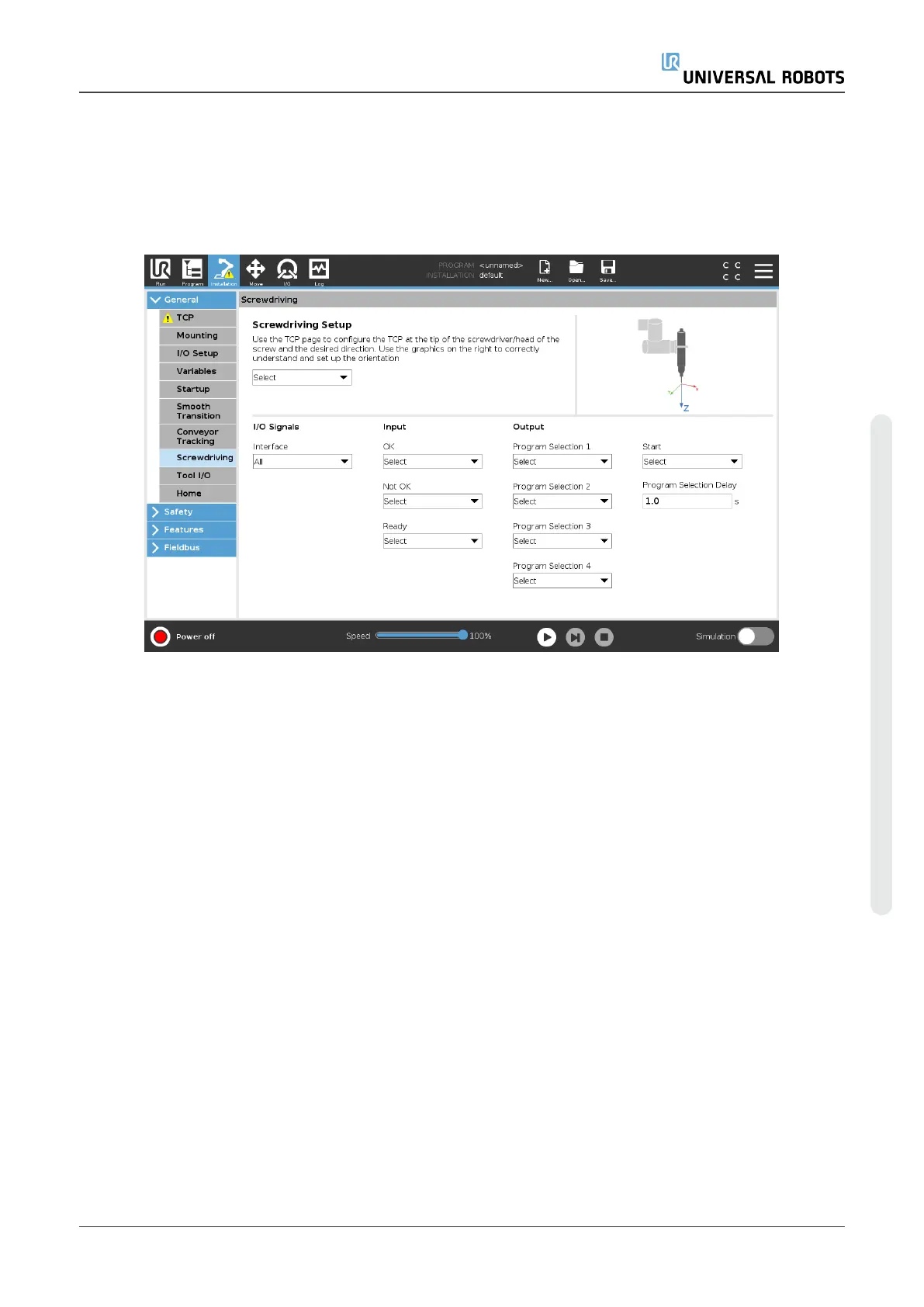
24.15.1. Configuring a Screwdriver
1. In the Header, tap Installation.
2. Under General, select Screwdriving, or create your own TCP for screwdriving by tapping TCP
under General.
3. Under Input and Output, configure the I/Os for your screwdriver. You can use the Interface
list to filter the type of I/Os displayed under Input and Output.
4. Under Start, select the I/O that starts the screwdriving action.
In any output Program Selection list under Output, you can select an integer output to switch
Program Selection (see23.13.8. Screwdrivingon page191) to a number field.
24.15.2. Configuring the Screwdriver Position
1. Under Screwdriving Setup, use the drop-down menu to select a previously defined TCP
(see24.2. TCP Configurationon page205) where Position and Orientation are set up as
follows:
User Manual 221 UR5e
24.Installation Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












