smoothens the path. RTCP Waypoints are taught by physically moving the Robot Arm to a
desired position.
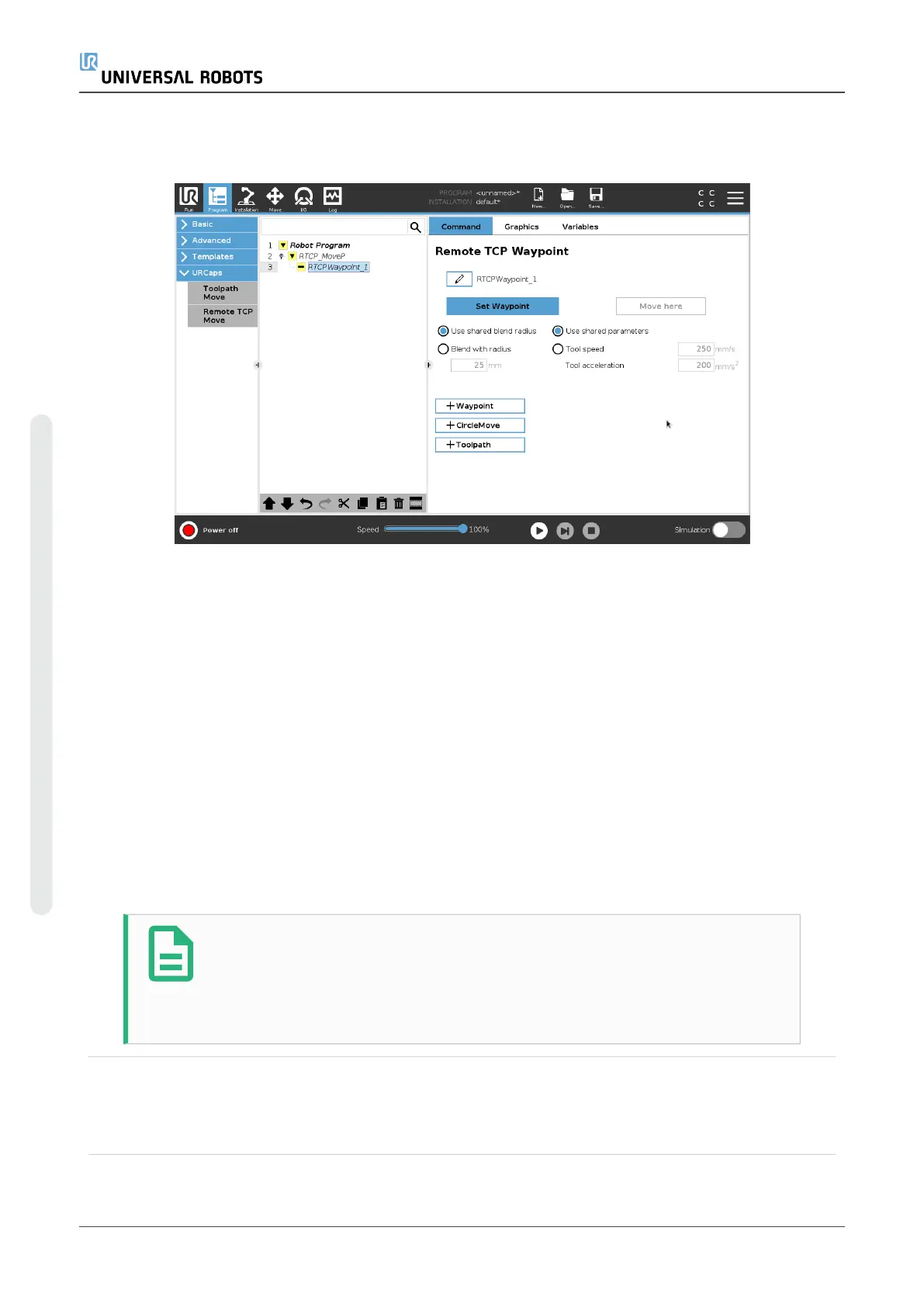
Teaching RTCP Waypoints
1. In the Program Tab, insert an RTCP_MoveP node.
2. On the RTCP_MoveP node, tap Set to bring up the Move screen.
3. On the Move screen, use Teach Mode or Jog to position the robot in a desired
configuration.
4. Tap the green check mark to validate.
Configuring an RTCP Waypoint
Use blends to enable the robot to smoothly transition between two trajectories. Tap Use
Shared Blend Radius or tap Blend with radius to set the blend radius for a waypoint from
an RTCP_MoveP.
NOTE
A physical time node (e.g. Move, Wait) cannot be used as a child of an
RTCP_MoveP node. If an unsupported node is added as a child to an
RTCP_MoveP node, the program fails to validate.
23.14.4. Remote TCP Toolpath
UR5e 196 User Manual
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












