The Remote TCP and Toolpath URCap generates robots motions automatically, making it
easier to follow complex trajectories accurately.
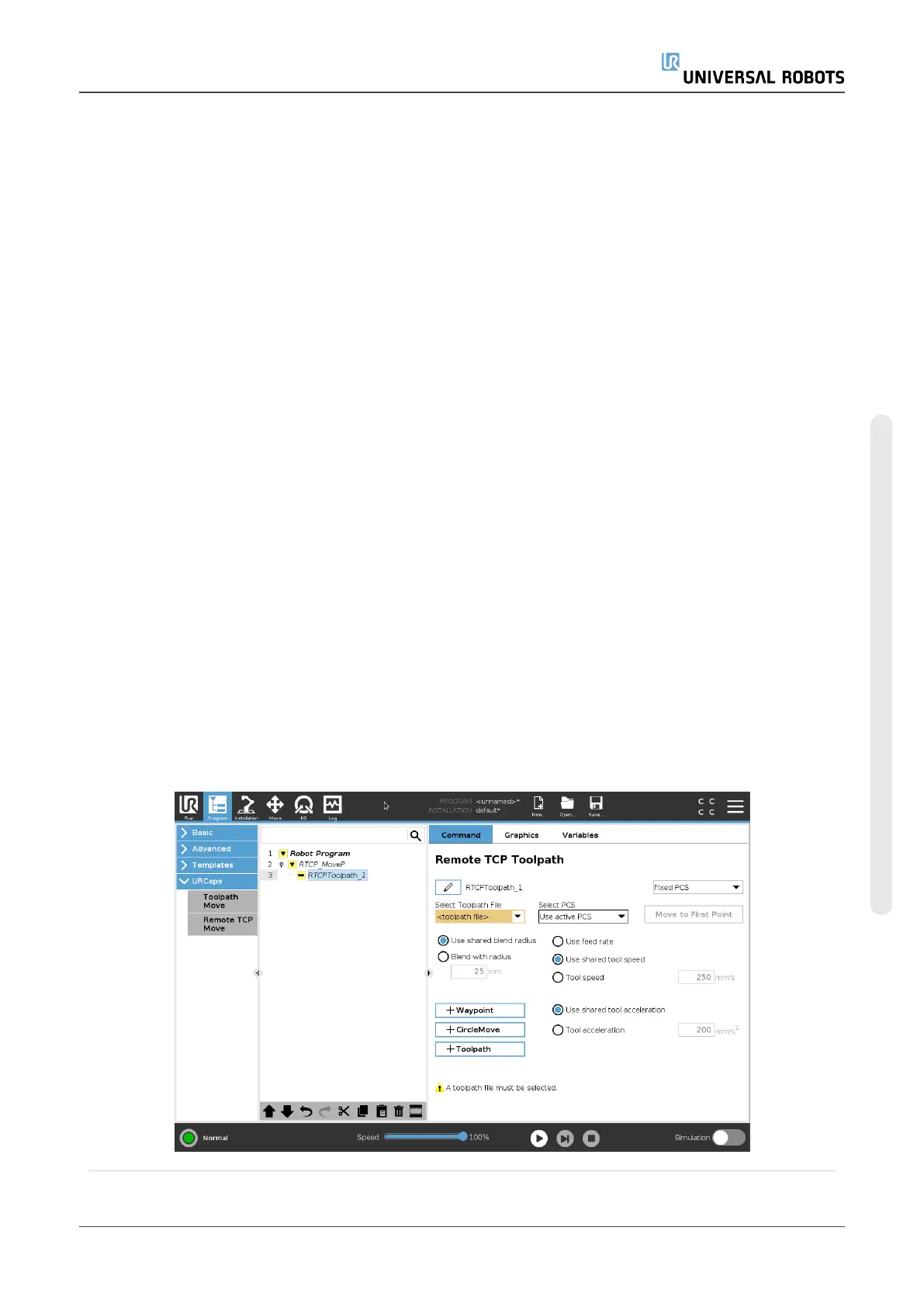
Configuring a Remote TCP Toolpath
1. Select Remote TCP Toolpath Moves on the Remote TCP & Toolpath URCap Home
Page to enter the workflow.
2. Follow the instructions under the Instructions Tab.
A Remote TCP Toolpath Move requires the following major components:
•
Toolpath file
•
Remote TCP
•
Remote TCP PCS
Configuring a Toolpath using CAD/CAM Software
A toolpath defines the orientation, trajectoy, speed or (feed rate) and travel direction of
the tool.
1. Create or import a CAD model of a part.
2. Set up a Part Coordinate System (PCS) fixed to the part.
3. Create a toolpath relative to the PCS based on part features
4. Simulate the toolpath motion to verify it meets expectation.
5. Export the toolpath into a G-code file with .nc file extension.
Importing a G-code Toolpath into PolyScope
User Manual 197 UR5e
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












