whereas a higher value will make the path smoother. While the robot arm is moving through
the waypoints with constant speed, the robot control box cannot wait for either an I/O
operation or an operator action. Doing so might stop the robot arm’s motion, or cause a
protective stop.
•
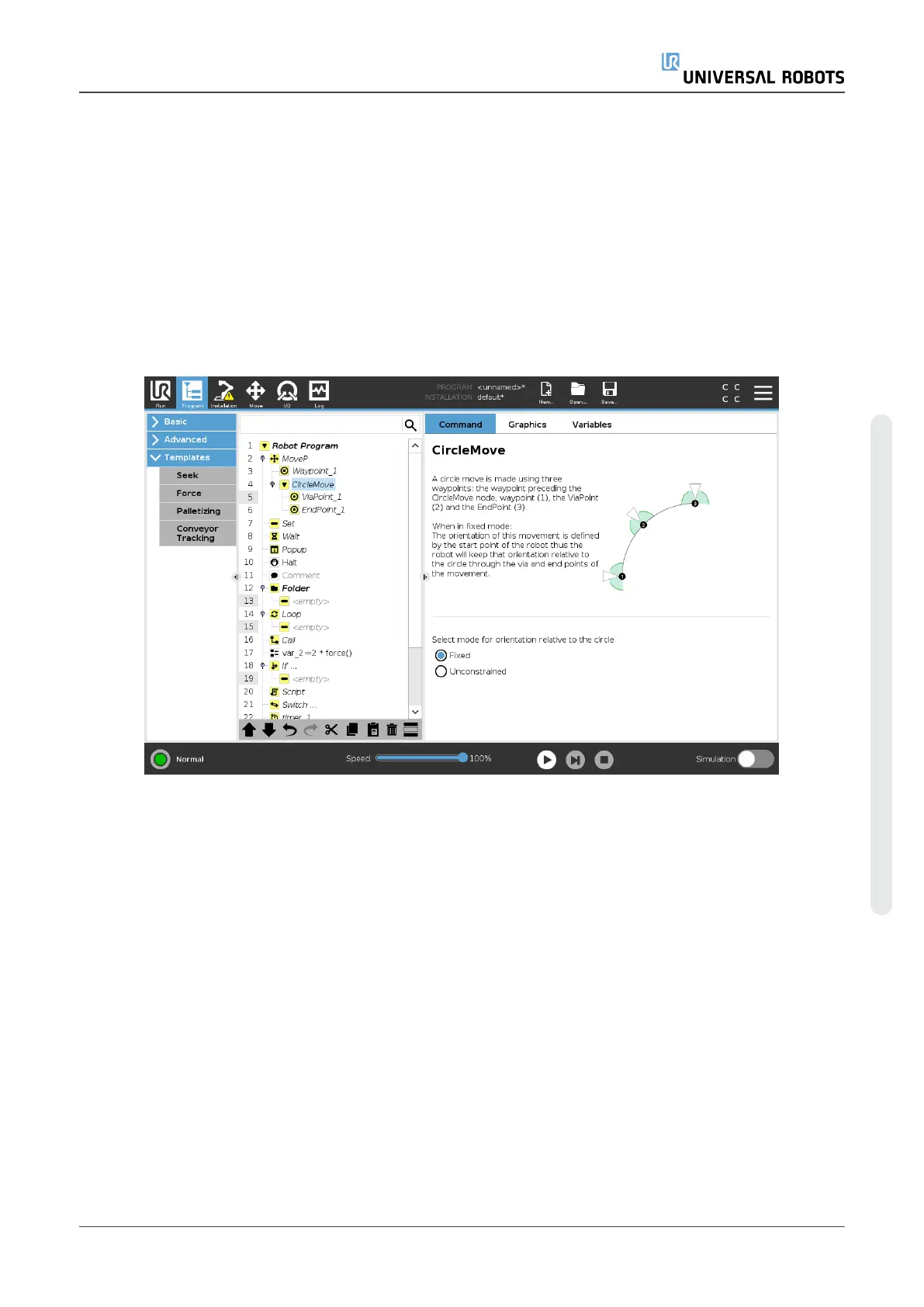
Circle move can be added to a moveP to make a circular movement. The robot starts the
movement from its current position or start point, moves through a ViaPoint specified on the
circular arc, and an EndPoint that completes the circular movement.
A mode is used to calculate tool orientation, through the circular arc. The mode can be:
•
Fixed: only the start point is used to define tool orientation
•
Unconstrained: the start point transforms to the EndPoint to define tool orientation
Shared parameters
The shared parameters in the bottom right corner of the Move screen apply to the movement from
the previous position of the robot arm to the first waypoint under the command, and from there to
each of the following waypoints. The Move command settings do not apply to the path going from
the last waypoint under that Move command.
TCP selection
The way the robot moves between waypoints is adjusted depending on whether the TCP is set
using a user defined TCP or an active TCP. Ignore Active TCP allows this movement to be adjusted
in relation to the Tool Flange.
User Manual 153 UR5e
23.Program Tab
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












