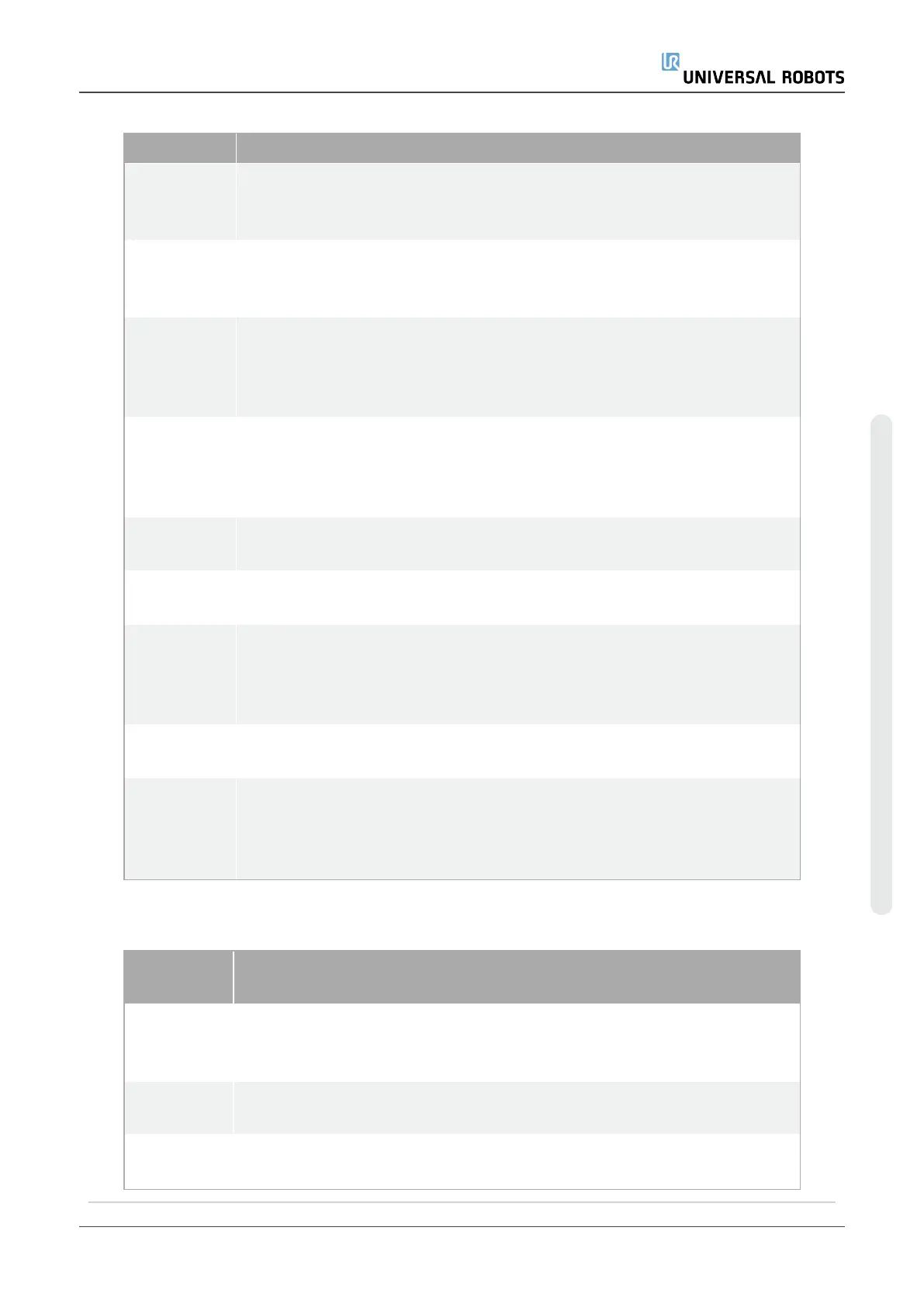
Safety Input Description
Robot
Emergency
Stop
Performs a Stop Category 1 (IEC 60204-1) via Control Box input,
informing other machines using the System Emergency Stop output, if
that output is defined.
System
Emergency
Stop
Performs a Stop Category 1 (IEC 60204-1) on robot only, in all modes
and takes precedence over all other commands.
Safeguard
Stop
Performs a Stop Category 2 (IEC 60204-1) in all modes, except when
using a 3-Position Enabling Device and a mode selector - then when in
Manual Mode, the Safeguard Stop can be set to only fucntion in
Automatic Mode.
Automatic
Mode
Safeguard
Stop
Performs a Stop Category 2 (IEC 60204-1) in Automatic mode ONLY.
Automatic Mode Safeguard Stop can only be selected when a Three-
Position Enabling Device is configured and installed.
Safeguard
Reset
Returns from the Safeguard Stop state, when a rising edge on the
Safeguard Reset input occurs.
Reduced
Mode
Transitions the safety system to use the Reduced mode limits.
Three-
Position
Enabling
Device
Initiates a Stop Category 2 (IEC 60204-1) when the enabling device is
fully pressed or fully released in manual mode only. Three-Position
Enabling Device Stop is triggered when an input goes low. It is
unaffected by a Safeguard Reset.
Operational
Mode
Switches between Operational modes. The robot is in Automatic mode
when input is low, Manual mode when input is high.
Automatic
Mode
Safeguard
Reset
Returns from the Automatic Mode Safeguard Stop state, when a rising
edge on the Automatic Mode Safeguard Reset input occurs.
For interfacing with other machines, the robot is equipped with the following safety
outputs:
Safety
Output
Description
System
Emergency
Stop
While this signal is logic low, the Robot Emergency Stop input is logic low
or the Emergency Stop button is pressed.
Robot
Moving
While this signal is logic high, no single joint of the robot moves more
than 0.1rad/s.
Robot Not
Stopping
Logic high when the robot is stopped or in the process of stopping due to
an Emergency Stop or Safeguard Stop. Otherwise it will be logic low.
User Manual 21 UR5e
3.Safety-related Functions and Interfaces
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












