Configuration
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
168
of 820
4.4
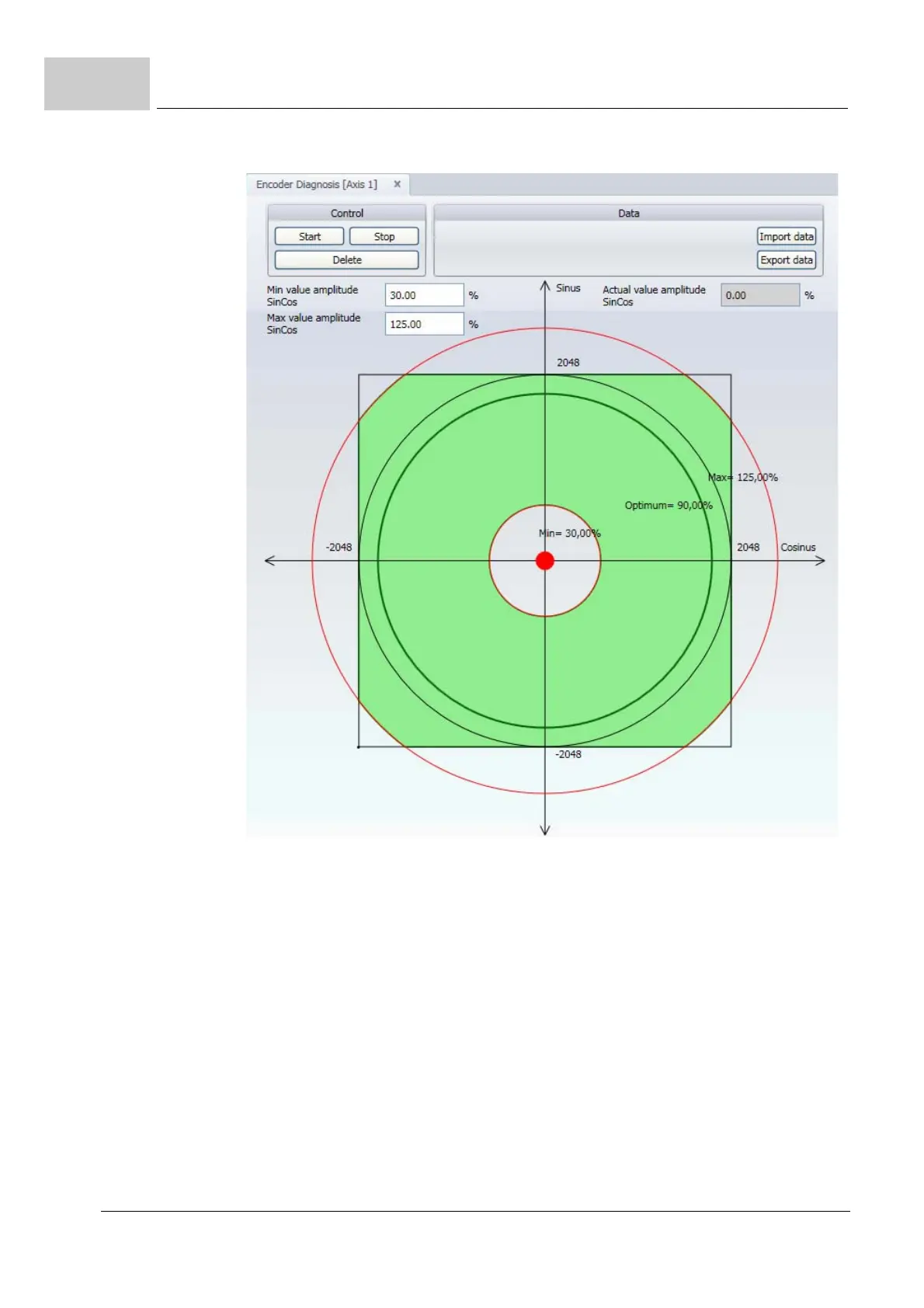
Figure 84: ProDrive Encoder diagnosis
2. Statical encoder error correction
The encoder signals are subject to tolerances. Therefore, the sinusoidal signals and the
cosine signals are not always conform with an exact sinusoidal function. These toleranc
-
es can cause speed vibrations with a frequency of speed*PPR (pulses per revolution).
These tolerances are suppressed by using the automatic statical encoder error correc
-
tion. The offset values of the encoder tracks are fit, so that the speed vibrations are min-
imized.
Calculation takes place in speed control. Thereby, the setpoint frequency of speed * PPR
(pulses per revolution) must be constant and they must lie between 30 and 500 Hz.
Measuring checks are made with the circular buffer speed (Z18.22–) and the sinusoidal
track (Z106.24–). The measurement at a SinCos Hiperface encoder with 1024 PPR
count in speed control with a set speed of 10 rpm is shown in the following. The relevant
frequency is
f = 10 rpm * 1024 = 170 Hz.