Configuration
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
284
of 820
4.4
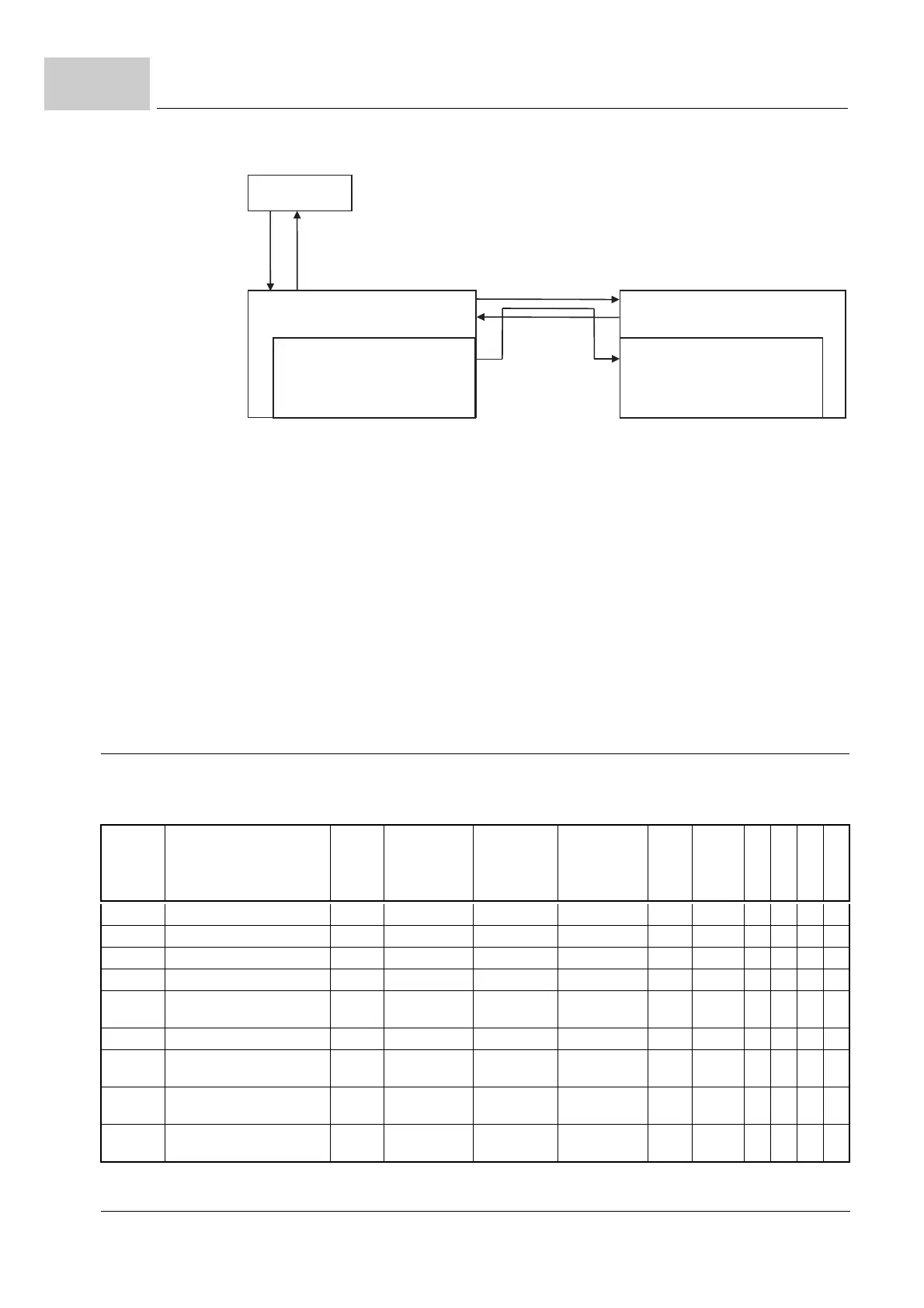
Figure 115: Cross communication via EtherCAT
The drive master writes its actual values (coupling command master, torque set value
master, torque init stress actual value master (optional)) in the telegram received from the
control and sends up the telegram to the drive slave. The drive slave reads this values in
the same bus cycle as its set values. Therefore
m the drive master must be located physically in the EtherCAT cycle in front of the drive
slave in order that the drive slave gets the actual values.
m the coupling command master, the torque set value master and torque init stress ac-
tual value master (optional) must be mapped in the drive master and the drive slave
in the same address area.
4.4.18.1 Parameter overview
Functional block: FbTrqCoupling[147]
EtherCAT
EtherCAT
5000_0181_rev02_int.cdr
Control
EtherCAT master
Drive master
EtherCAT slave 1
Actual values
P147.4 Coupling command master
P147.19 Torque set value master
(P147.21 Torque init stress
actual value master)
Drive slave
EtherCAT slave 2
EtherCAT
cross communication
Set values
P147.4 Coupling command master
P147.19 Torque set value master
(P147.21 Torque init stress
actual value master)
Transfer P147.21 at direct torque init stress only (P147.1 Bit 16 = 1)
Number Name Type Min Max Default Value Unit Factor
Read only
Storage
DS Support
Cyclic Write
147.1 Mode UDINT 0 0xFFFFFFFF 0 1:1 X
147.2 Status master UINT 0 0xFFFF 0 1:1 X
147.3 Status slave UINT 0 0xFFFF 0 1:1 X
147.4 Coupling command master UINT 0 1 0 1:1 X
147.5 Torque coupling factor mas-
ter
FLOAT 0 1 0 1:1 X
147.6 Torque coupling factor slave FLOAT 0 1 0 1:1 X
147.7 Compensating controller P-
gain
FLOAT 0 10000 2 Grad/
Nms
1:1 X
147.8 Compensating controller
integral action time
FLOAT 0 100000 10 ms 1:1 X
147.9 Compensating controller out-
put upper limit
FLOAT 0 180000 18000 Grad/s 1:1 X