Description of the Software Modules and Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07
283
of 820
4
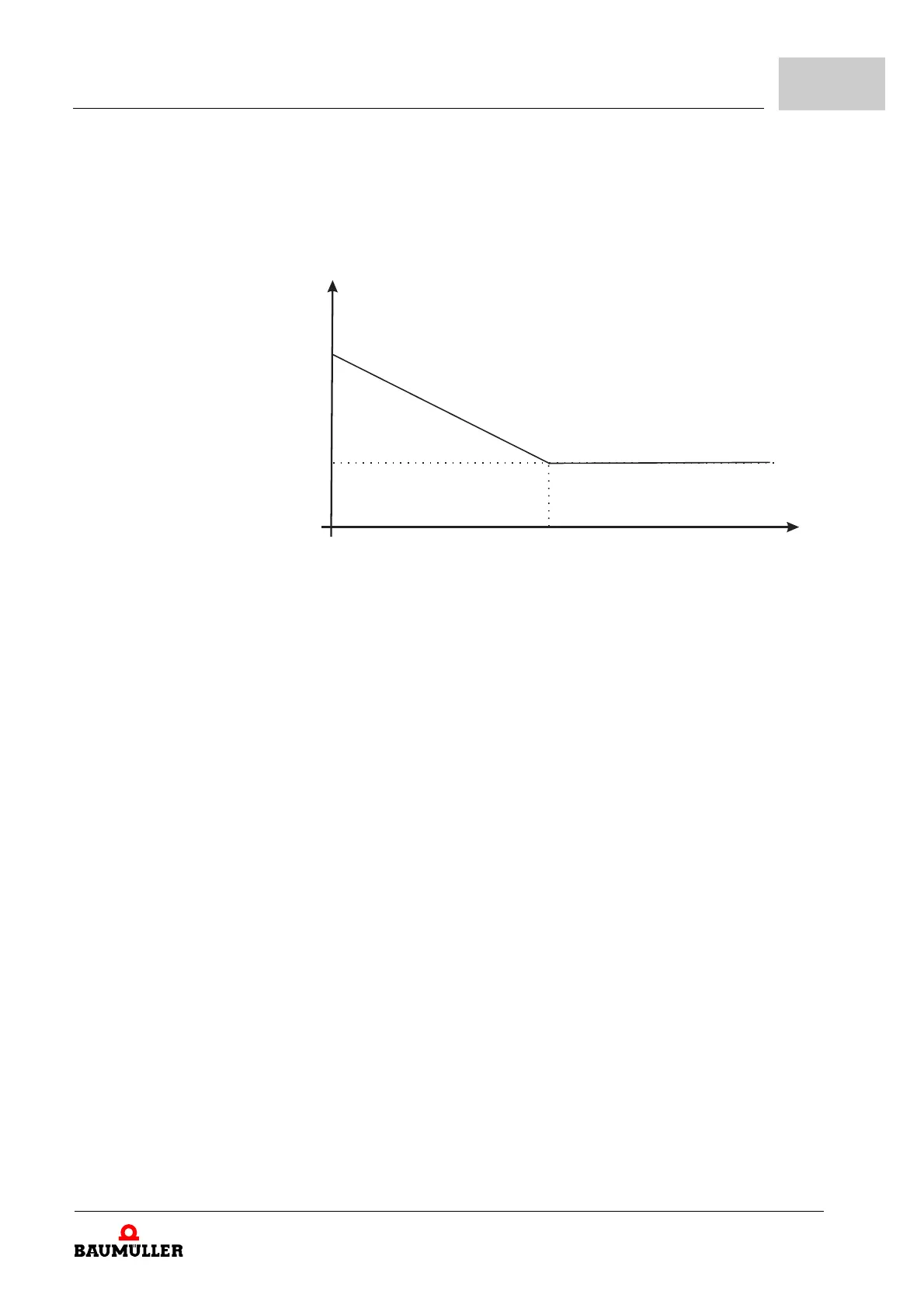
Speed dependent torque init stress
The torque init stress can be set also speed dependent (see the following figure) as need-
ed, if e.g. a high torque init stress is needed at standstill, otherwise the drives should sup-
port one another as possible.
Figure 114: Torque init stress of the torque coupling
Cross communication
The following parameters must be sent cyclic:
m Z147.4– Coupling command master
m Z147.19– Torque set value master
m Z147.21– Torque init stress actual value master
(only if torque init stress is connected directly (Z147.1– Bit 16 = 1))
The cross communication can take place via fieldbus (e.g. EtherCAT).
Cross communication via fieldbus
The parameter to be transferred cyclic (coupling command master, torque set value mas-
ter, torque init stress actual value master (optional)) must be mapped correspondingly
controller-side and EtherCAT-side. Set
Z147.1– Bit 4 = 0 at the slave axis.
|n|
P147.15
P147.16
P147.17
5000_0180_rev01_int.cdr
|n| < P147.17: Mv = P147.16 * n/P147.17 + P147.15 * (1 - n/P147.17)
|n| >= P147.17: Mv = P147.16
Mv
(efficient torque
init stress)