Operating Modes
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
662
of 820
4.8
Figure 215: Compensating controller for acceleration
If the speed ramp was set too steep at a high load torque, it can happen that the drive
cannot be accelerated furthermore. In this case the frequency can be reduced at a con
-
stant frequency (bit 7 of Z166.1–) to enable the drive acceleration.
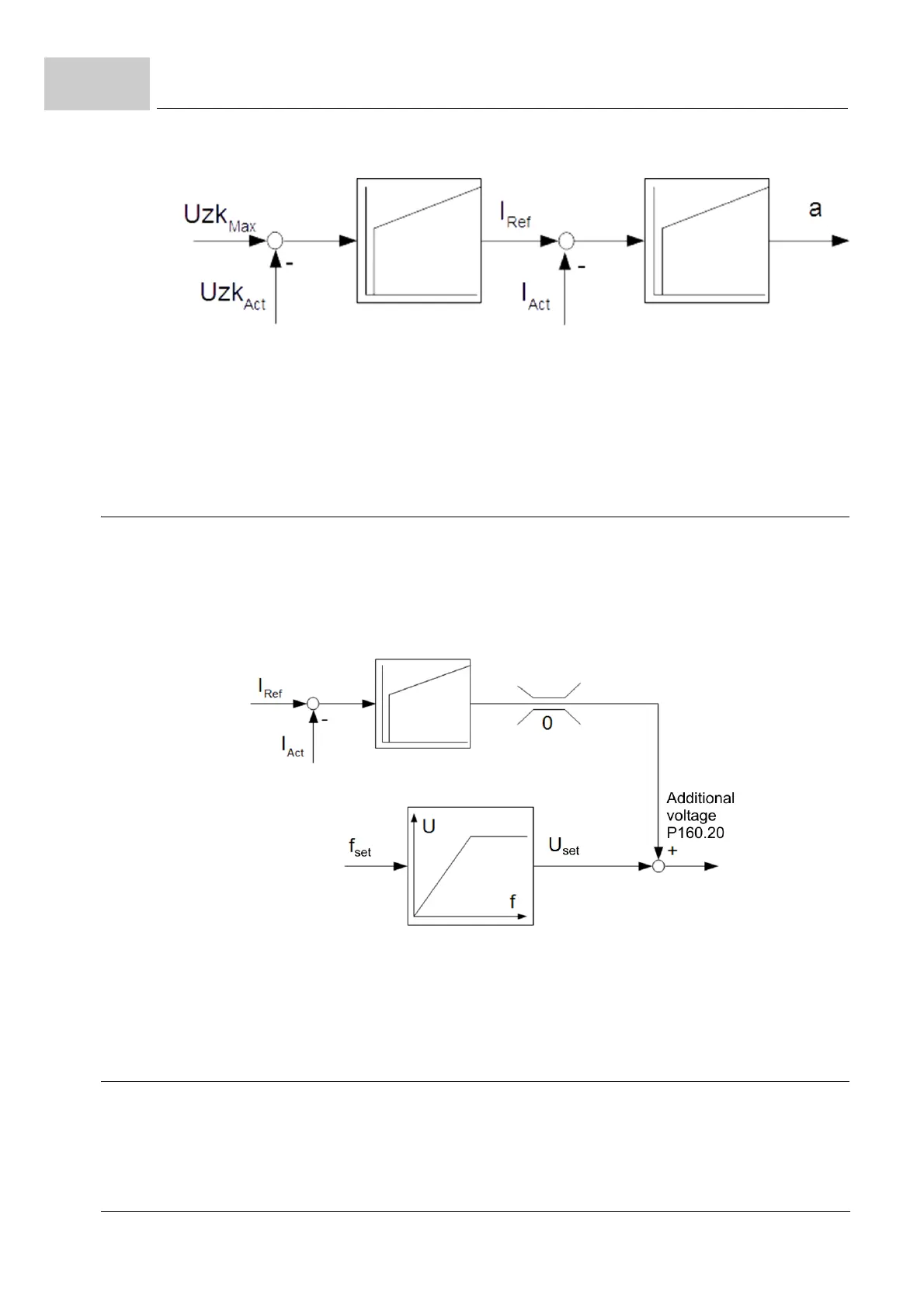
4.8.12.2 Current control
If a specified torque is required to operate at low frequencies the current control at low
frequencies (bit 3 of
Z166.1–) is recommended. An additional voltage (Z166.20–) is ap-
plied at the set frequency threshold (Z166.17–) via a PI controller, so that at least the set
current (Z133.22–) or maximum current (settable via bit 8 of parameter Z166.1–) is ap-
plied to the motor.
Figure 216: Current control
4.8.12.3 Parameter overview
Functional block: FbUfChart [166]