Description of the Software Modules and Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07
719
of 820
4
4.11.2 Position Error monitoring
The position error is the difference between the position set value and the actual position.
It can be monitored statically or dynamically.
The dynamic position error limit will become effective as soon as a new position set value
is available for each sampling time of the position controller.
The static position error limit becomes effective when the position controller either does
not receive a new position set value or it continues to receive the same position set value
repeatedly.
Two separate limits (thresholds) are available for position error monitoring. The following
property settings may be entered for each limit:
m Size of the window (position error limit)
m Response time (position error time)
m Type of monitoring - static, dynamic or both (see Mode 1 Z143.2– and Mode 2
Z143.5–)
Two bits are assigned to each threshold in the Parameter Z143.1– Status. If the actual
position error exceeds one of the two thresholds, the bit "Position Error Limit Exceeded"
will be set in the
Z143.1– Status. If the position error remains longer than the position
error time that was entered, another bit is set in the Status and the error
207 Position error limit 1 exceeded or
208 Position error limit 2 exceeded
will be reported.
If the position error falls below the threshold setting, the status bit "Position error limit ex-
ceeded" will be deleted again.
The cycle of the position error monitoring is 1 ms.
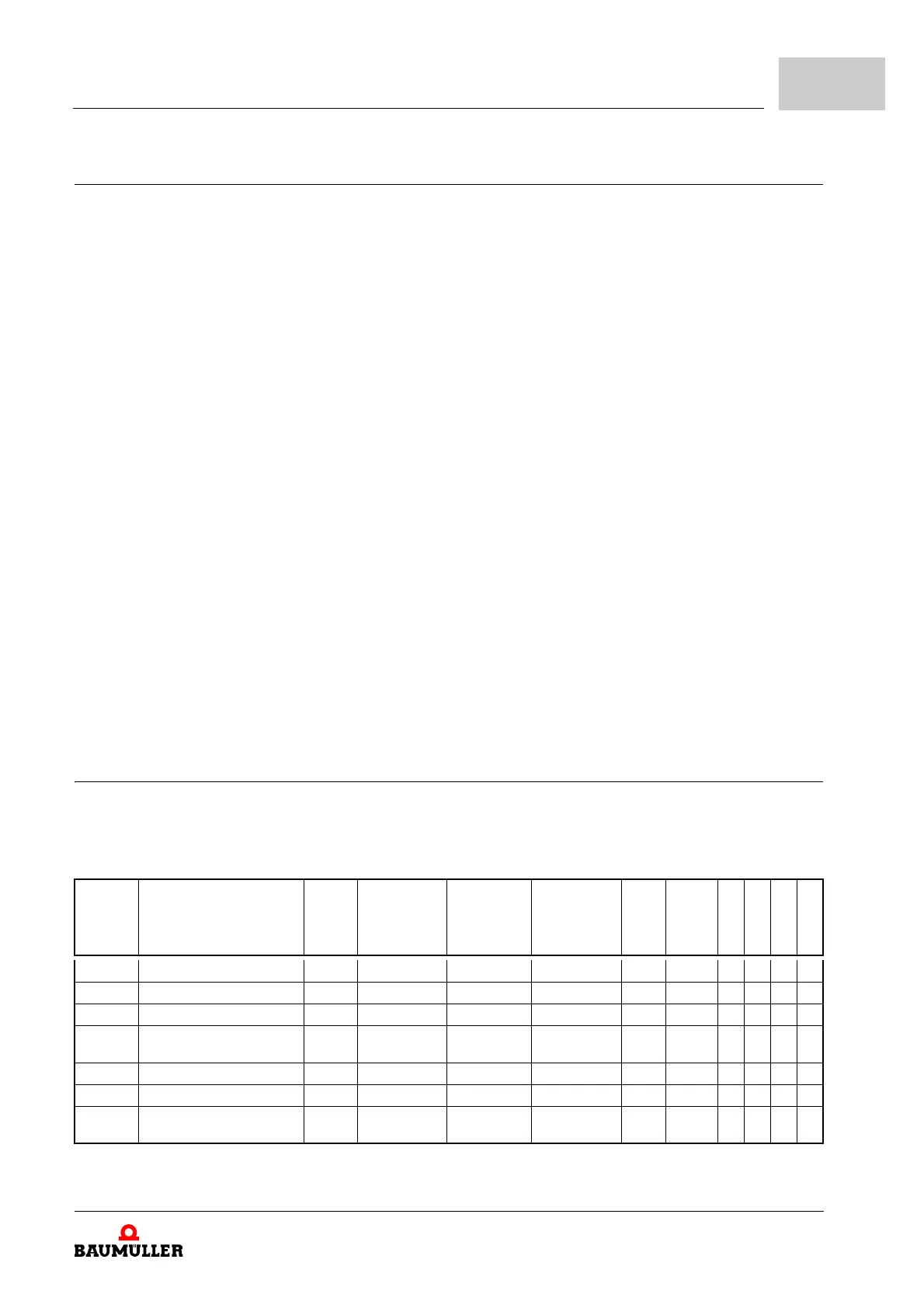
4.11.2.1 Parameter overview
Functional block: FbMonitoring [143]
For Parameter 47.55, see ZCurrent Controller– from page 469
Number Name Type Min Max Default Value Unit Factor
Read only
Storage
DS Support
Cyclic Write
143.1 Status WORD 0 0xFFFF 0 1:1 X
143.2 Mode 1 UINT 0 2 0 1:1 X
143.3 Position error limit 1 UDINT 0 0xFFFFFFFF 0xFFFFFFFF 1:1 X
143.4 Position error monitoring
Time 1
UINT 0 0xFFFF 0xFFFF ms 1:1 X
143.5 Mode 2 UINT 0 2 0 1:1 X
143.6 Position error limit 2 UDINT 0 0xFFFFFFFF 0xFFFFFFFF 1:1 X
143.7 Position error monitoring
time 2
UINT 0 0xFFFF 0xFFFF ms 1:1 X