Set Value Generators
Parameter manual b maXX BM3000
Document no.: 5.12001.07 Baumüller Nürnberg GmbH
422
of 820
4.6
4.6.4 Error Reaction Return Motion
In addition to the error reactions „Stop“ and „Pulse inhibit“ the reaction „Return motion“ is
settable for some errors. It concerns an easy positioning with trapezoid profile, whose tar
-
get position can be set absolutely or relatively to the current position.
For many errors, e.g. error no. 1016 „Mains failure (Mono unit)“ in addition to the standard
error reaction as „Pulse inhibit“ and „Stop“ also the error reaction „Return motion“ is set
-
table. At initiation of an error with the „Return motion“ reaction the drive goes to a therefor
parameterized target position. The speed profile during the positioning to the return mo
-
tion target is preset by a parameterized trapezoid (maximum speed, maximum accelera-
tion). The maximum speed must not be greater than the maximum speed of the drive.
The return motion target can be preset absolute or relatively in relation to the Z106.12–
Position actual value. If the return motion target is not reached, then this will be registered
in
Z148.2– Status and the corresponding error message no. 2703 is transmitted. For this
purpose the position error of return motion is monitored. The return motion target is con-
sidered as not reached, if a position error is recognized according to the limit in Z148.6–
Position Error Limit and Z148.7– Position Error Time.
The return motion positioning is not an operating mode of its own. During positioning to
the return motion target the drive remains in the „error reaction active“ status (see
ZState
Machine of the Device Controller– on page 334 in chapter Drive management).
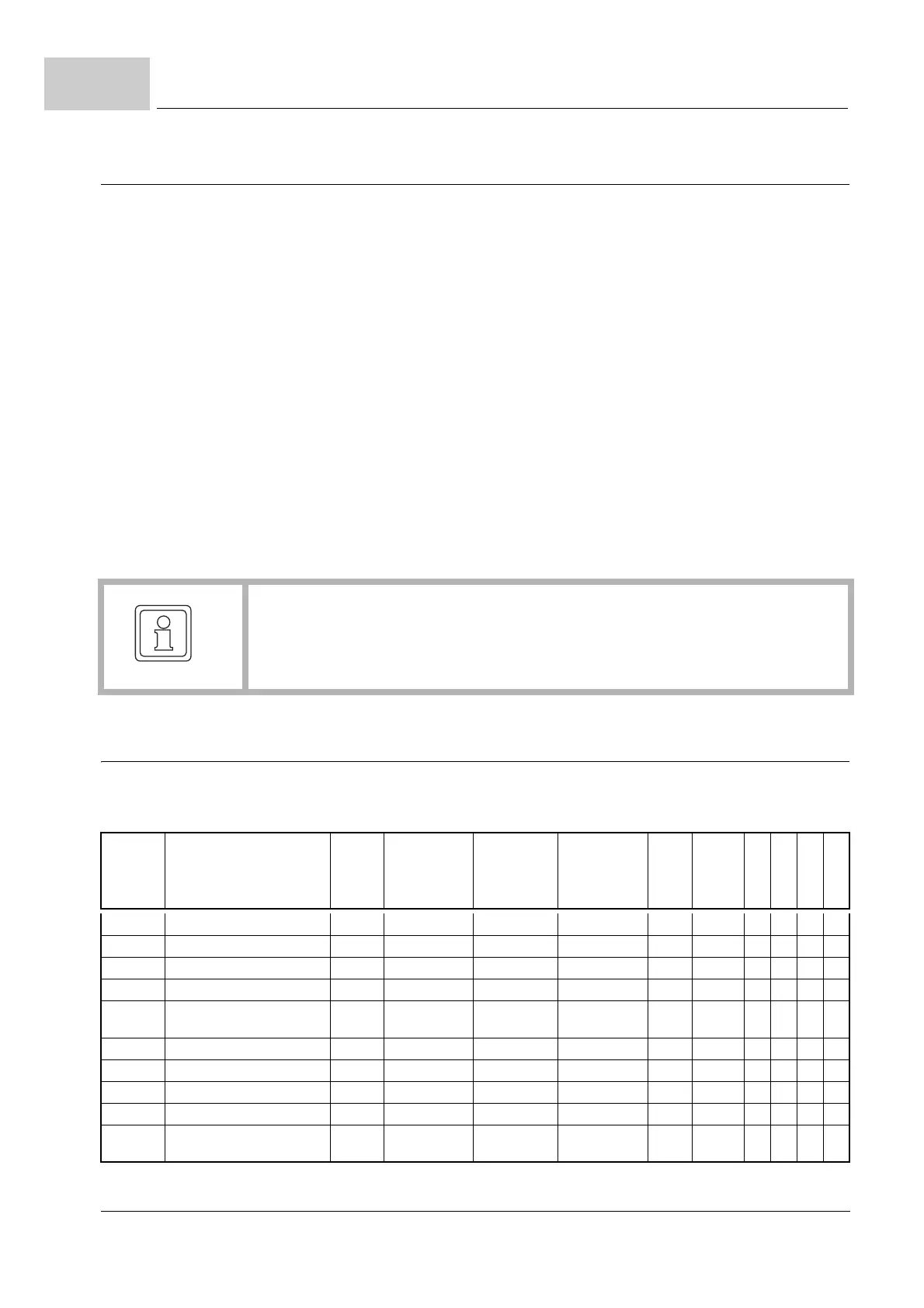
4.6.4.1 Parameter Overview
Functional block: Return Motion[148]
NOTE!
If the error reaction „Return motion“ is set for the error mains failure, then also the
motor-driven operation at mains failure must be set (
Z130.10– Supply mode
bit 1 = 1).
Number Name Type Min Max Default Value Unit Factor
Read only
Storage
DS Support
Cyclic Write
148.1 Mode DWORD 0x0 0xFFFFFFFF 0x0 1:1 X
148.2 Status UDINT 0 0xFFFFFFFF 0 1:1 X
148.3 Target position UDINT 0 0xFFFFFFFF 0 Inc 1:1 X X
148.4 Speed limit UDINT 0 13200 1000 Inc/ms 1:1 X
148.5 Acceleration limit UDINT 25 45000 200 Inc/
ms
2
100:1 X
148.6 Position Error Limit UDINT 0 0xFFFFFFFF 0xFFFFFFFF Inc 1:1 X
148.7 Position Error Time UINT 0 65535 65535 ms 1:1 X
148.8 Output position set value UDINT 0 0xFFFFFFFF 0 Inc 1:1 X
148.9 Output speed set value DINT -65535 65535 0 Inc/ms 1:1 X
148.10 Output acceleration set value DINT -65535 65535 0 Inc/
ms
2
100:1 X