Description of the Software Modules and Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07
593
of 820
4
4.8.3.17 Homing Method 35 (set home position only)
With this homing method the home position is set in the current position. The drive there-
by remains in the current position.
4.8.3.18 Manufacturer specific homing methods
Other manufacturer specific Homing Methods are available. Methods –1 to –5 are identi-
cal with some of the profile conforming homing methods. They only exist for reasons of
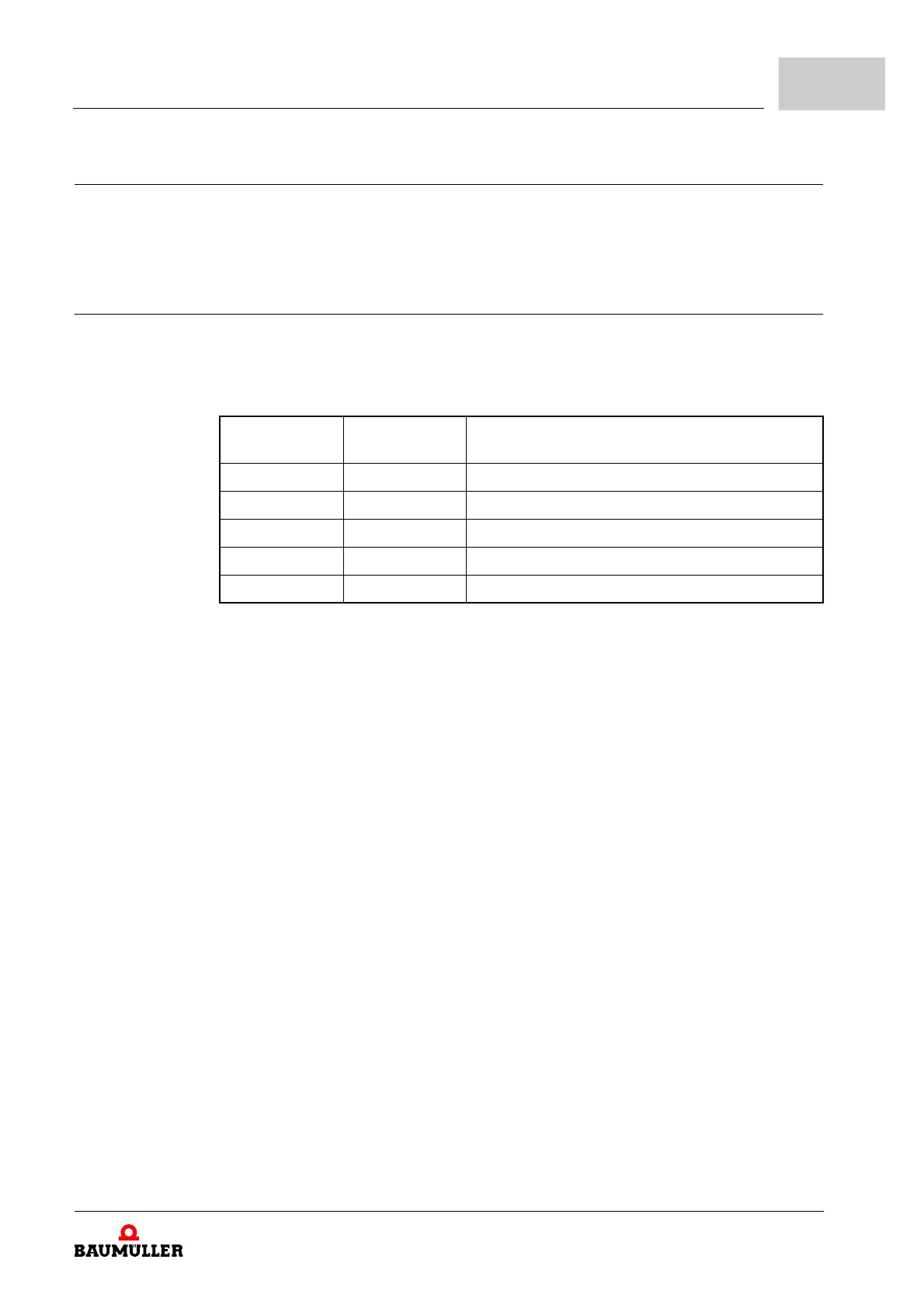
compatibility. The table below shows the assignment:
Homing method –6:
This method is not part of the profile conforming homings. The next zero angle (shortest
direction) is applied and the home position is set there.
Homing methods -7 and -8:
These methods reference a mechanical limit position.
With Mode –7 the drive moves clockwise and with –8 counterclockwise toward the me-
chanical stop.
m Phase 1
Approaching the mechanical stop at the referencing speed. The torque will be limited
at the start of homing to
Z120.12– Homing torque limit.
To recognize the mechanical stop, a test will be run to determine whether the drive is
present at the current limit (speed controller status
Z18.20– Bit 13 = 1) and, at the
same time, the speed zero message (Z6.2–). The mechanical stop is considered to be
recognized when both conditions have been met through Z120.11– Homing blocking
time.
m Phase 2
If the mechanical stop has been recognized, the home position will be set at this posi-
tion and the torque limit Z120.12– Homing torque limit will be canceled again.
Manufacturer
specific method
corresponds
with Method
Description
-1 34 next Zero pulse or Zero angle, Right revolution
-2 33 next Zero pulse or Zero angle, Left revolution
-3 35 Set home position
-4 17 negative limit switch without zero pulse
-5 18 positive limit switch without zero pulse