Description of the Software Modules and Parameters
Parameter manual b maXX BM3000
Document no.: 5.12001.07
565
of 820
4
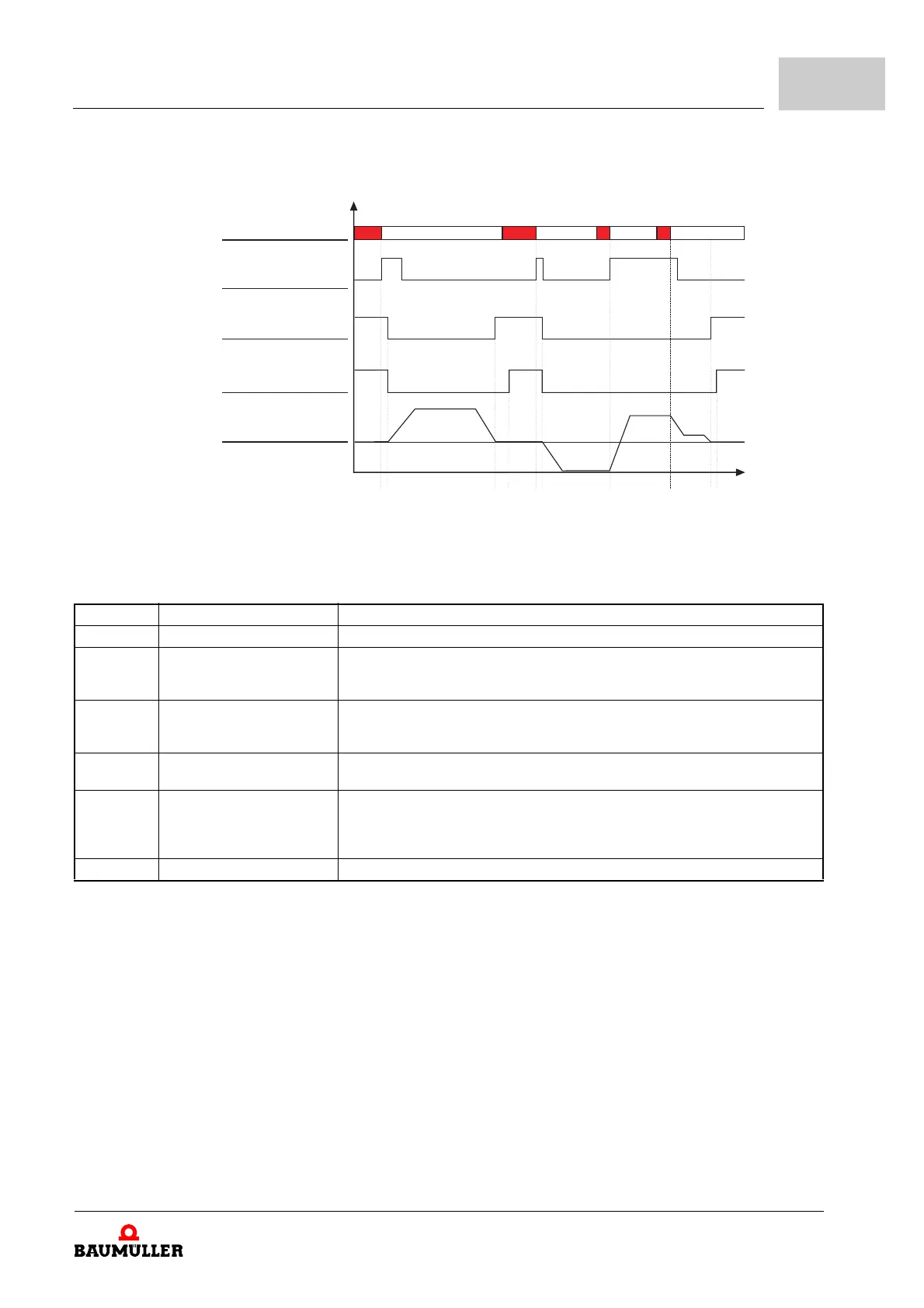
m Sequence of events for a normal relative positioning task (Target Mode = 1 or -1)
Figure 188: Sequence for normal relative positioning
Description of the transitions:
m Handshake procedure for the "Start Positioning" method
A handshake procedure is implemented to guarantee a clean, time-independent mecha-
nism for controlling the positioning.
5000_0152_rev02_int.cdr
t
v
2311253464
Speed profile of drive
Data
118.1
Function completed
Positioning status . 1bit no
108.3
Target position reached
Statusword . 10bit no
108.1
Start positioning
Controlword bit no. 11
Transition Meaning Comment
1 Start positioning L H Positioning data valid; start request transmitted to control word.
2 Function ended H L and
Target position reached H L
Starting edge of Bit 11 in the control word detected. Positioning is started. Start Posi-
tioning can be reset.
Between (1) and (2) there is a delay of up to 1 ms!
3 Function ended L H Set Value setting by the ramp generator ended.
Caution: Position set values may continue to be issued via the smoothing generator;
see Positioning Status Bit 1
4 Target position reached L H Is set correspondingly later than the function ends, depending on settings for Position-
ing Window and Positioning Window Time.
5 New target position valid New target position transmitted, target specification altered or the positioning set has
been changed. Start bit is set again. New travel route is added to the previous one (in
the example, a reversal of the direction of revolution takes place, as e.g. Target Mode
has changed from +1 to -1).
6 New positioning speed valid Start bit is set; a new positioning speed has been transmitted to positioning set 0.