3.7 Address Configuration
A3-76
ME0384-4A
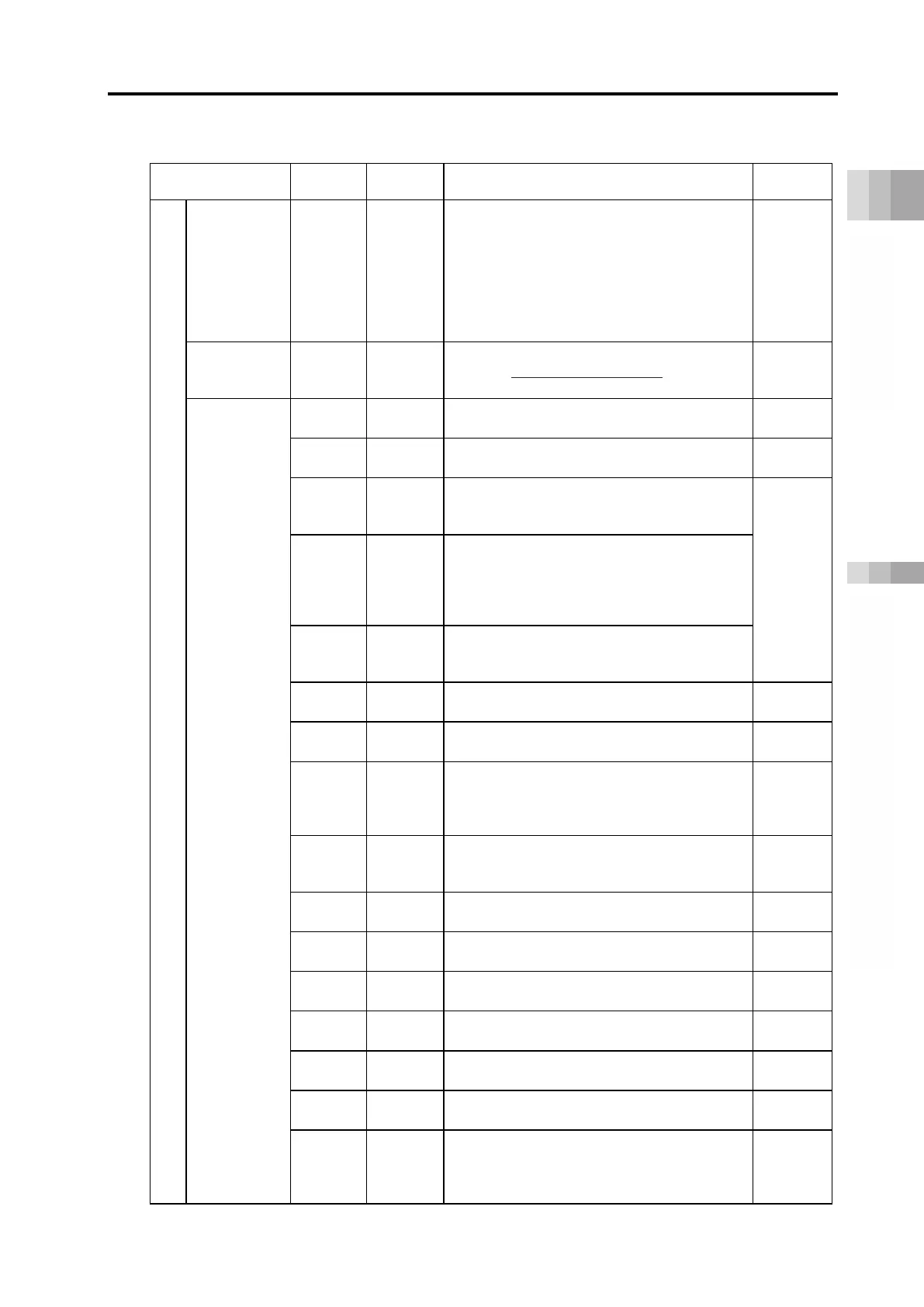
[I/O Signal List] Positioner 1/2 mode
(ON = corresponding bit is "1", OFF = corresponding bit is "0")
Signal type Bit
Signal name
Content Details
PLC input
Present
position
data
32-bit
data
-
32-bit signed integer (unit: 0.01 mm;
0.001° for DD motor).
Ex) For +25.40 mm, outputs as 2540.
● The maximum output value is
+9,999.99 mm = 999999.
● For negative numbers, 2ʼs complement
will be displayed when reading is made
Page
A3-123
position
b6-b0 PM**
Reads the completed position No. in binary.
Outputs the simple alarm code while alarm
is generated. (Refer to P. C2-10)
Page
A3-123
Status
signal
b15 EMGS
Emergency stop status
[ON: Emergency stop status]
3.8 [2]
b14 CRDY
Controller ready
[ON: Ready]
3.8 [1]
b13 ZONE2
[ON :
Present position is within the setting range of zone 2,
OFF:
Limited position is not within the setting range
]
3.8 [9] b12 ZONE1
[ON :
Present position is within the setting range of zone
1,
OFF:
Limited position is not within the setting
b11 PZONE
Position zone output monitor
[ON when the present position is within
the position zone setting]
b10 MODES
Teaching mode status
[ON for teaching mode]
3.8 [13]
b9 WEND
Position data import complete
[ON when position data import completes]
3.8 [14]
b8 MEND
[ON :
When in positioning complete, push-motion
complete or idling status after travel,
OFF: Travel start or servo OFF]
3.8 [19]
b7 ALML
Minor malfunction alarm output
[ON: When overload warning or message
3.8 [21]
b6 LOAD
Load output judgment status
[ON: When collision is detected]
3.8 [22]
b5 PSFL
Push-motion operation contactless
[ON:
push-motion operation completed contactless
]
3.8 [18]
b4 SV
Operation ready
[ON: Operation ready (Servo ON)]
3.8 [5]
b3 ALM
Alarm
[ON: Alarm generated, OFF: No alarm]
3.8 [3]
b2 MOVE
Traveling
[ON: Traveling, OFF: Stopped]
b1 HEND
Home return complete
[ON:
Maintaining home after home return complete
]
3.8 [6]
b0 PEND
[ON :
After completion, stopped at servo ON,
OFF: For contactless push-motion,
3.8
[5] ~ [7]
 Loading...
Loading...





