3.8 I/O Signals
A3-129
ME0384-4A
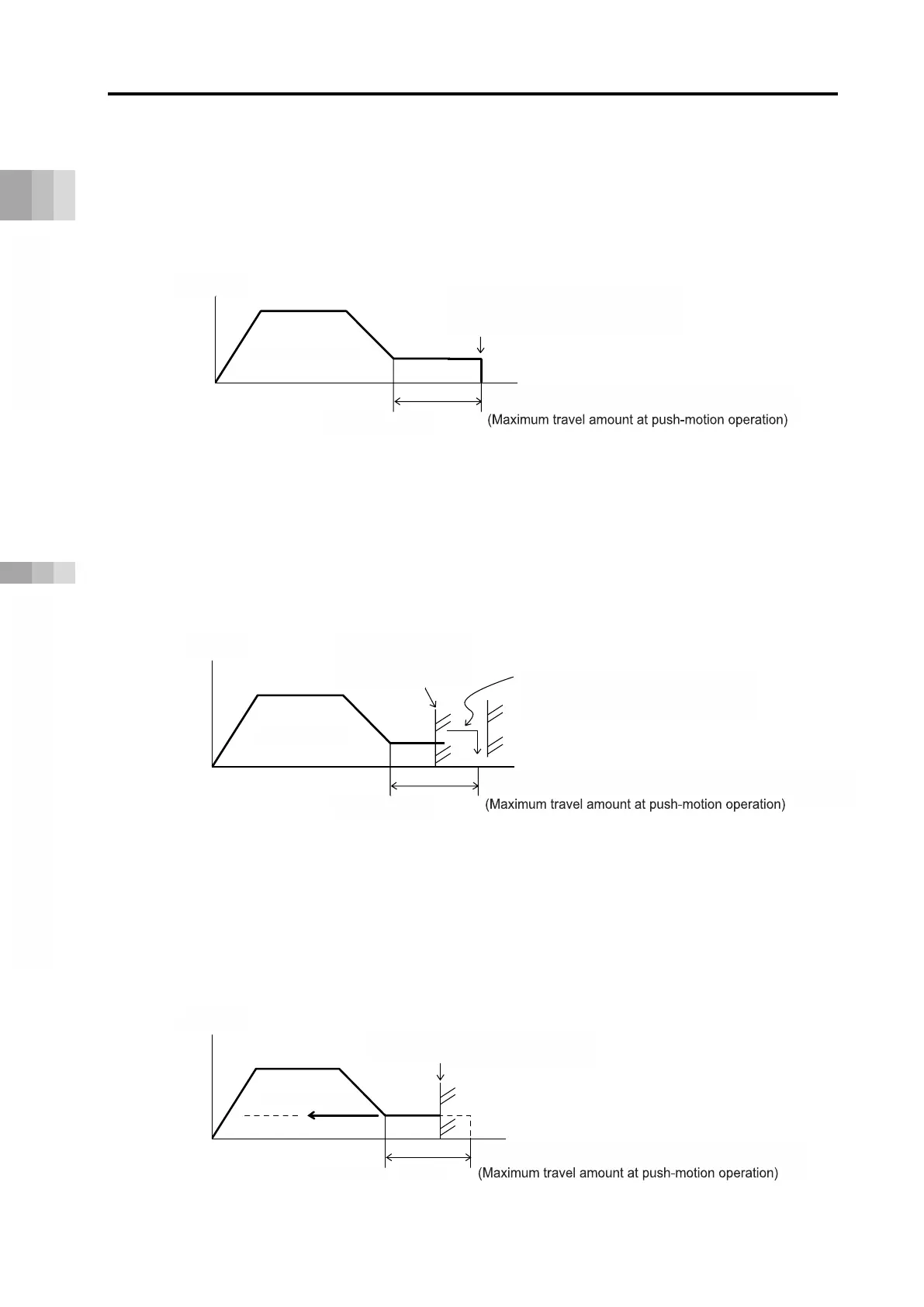
(2) For push-motion contactless
Even if it travels the distance set for positioning width, positioning complete signal PEND will not
be output if it has not pushed the workpiece (the current of the motor has not reached the
current limit value at the time of pushing). However, completed position No. is output.
At this time, PSFL of status signal bit 5 becomes "1" (ON).
(3) If the workpiece moves after pushing
■ If the workpiece moves in the pushing direction
Once the workpiece moves in the pushing direction after pushing is completed, the actuator
tracks the workpiece within the range of the positioning width.
If the traveling current value becomes smaller than the pushing current limit value, the
positioning complete signal PEND will be "0" (OFF). When it reaches the current limit value
again, it becomes "1" (ON).
■ If the workpiece moves in the direction opposite to the push direction (when the reaction force
from the workpiece is too strong and it is pushed back)
If pushed back due to reaction force from the workpiece after pushing is completed, the
actuator is pushed back to the utmost until the pushing force and the reaction force from the
workpiece are balanced.
At this time, the positioning complete signal PEND remains "1" (ON). When pushed back to
the target position, an alarm is generated.
If it has not pushed the workpiece
Positioning complete signal will not
turn ON
Speed
If the workpiece shifts backwards,
it tracks within the positioning width
range
Position at which
pushing complete
Position at which pushing complete
was determined first

 Loading...
Loading...




