4.4 Address Configuration
B4-55
ME0384-4A
Chapter 4 Network Configuration
[For PROFIBUS-DP, EtherNet/IP, EtherCAT]
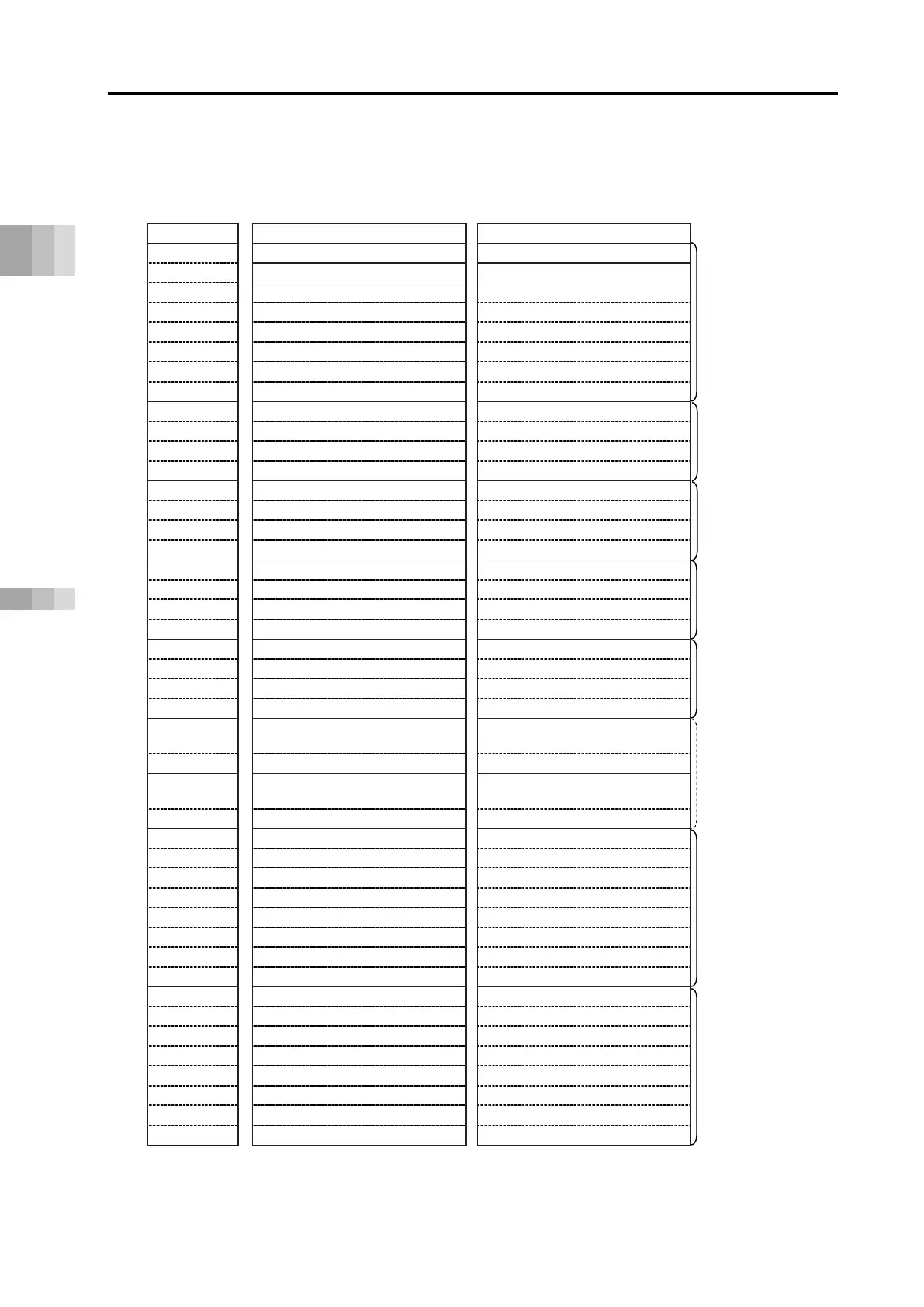
■ Overall address configuration example (direct numerical control mode + simple direct
mode/positioner 1 mode)
Shows direct numerical control mode connection for 2 axes and simple direct or positioner 1
mode connection for 12 axes.
RCON
PLC input
*
2
Gateway control signal 1
Gateway status signal 1
8 words each
Power supply unit status signal 0
6
(Not available)
Power supply unit status signal 1
8
(Not available)
Power supply unit status signal 2
Power supply unit status signal 3
Power supply unit status signal 4
14
(Not available)
(Not available)
(Axis 0) Specified position data (L)
(Axis 0) Present position data (L)
(Axis 0) Specified position data (H)
(Axis 0) Present position data (H)
(Axis 0) Command position No.
(Axis 0) Completed position No.
22
(Axis 0) Control signal
(Axis 0) Status signal
(Axis 1) Specified position data (L)
(Axis 1) Present position data (L)
26
(Axis 1) Specified position data (H)
(Axis 1) Present position data (H)
4 words each
(Axis 1) Command position No.
(Axis 1) Completed position No.
30
(Axis 1) Control signal
(Axis 1) Status signal
(Axis 2) Specified position data (L)
(Axis 2) Present position data (L)
(Axis 2) Specified position data (H)
(Axis 2) Present position data (H)
4 words each
(Axis 2) Command position No.
(Axis 2) Completed position No.
38
(Axis 2) Control signal
(Axis 2) Status signal
(Axis 3) Specified position data (L)
(Axis 3) Present position data (L)
(Axis 3) Specified position data (H)
(Axis 3) Present position data (H)
4 words each
(Axis 3) Command position No.
(Axis 3) Completed position No.
46
(Axis 3) Control signal
(Axis 3) Status signal
・
・
・
4 words each
・
・
・
(Axis 12) Specified position data (L)
(Axis 12) Present position data (L)
(Axis 12) Specified position data (H)
(Axis 12) Present position data (H)
(Axis 12) Specified positioning width (L)
(Axis 12) Present current value (L) *1
118
(Axis 12) Specified positioning width (H)
(Axis 12) Present current value (H) *1
120
(Axis 12) Specified speed
(Axis 12) Present speed data
mode
(Axis 12) Specified acceleration/deceleration
(Axis 12) Pushing current limit value
126
(Axis 12) Control signal
(Axis 12) Status signal
(Axis 13) Specified position data (L)
(Axis 13) Present position data (L)
(Axis 13) Specified position data (H)
(Axis 13) Present position data (H)
(Axis 13) Specified positioning width (L)
(Axis 13) Present current value (L) *1
134
(Axis 13) Specified positioning width (H)
(Axis 13) Present current value (H) *1
8 words each
(Axis 13) Specified speed
(Axis 13) Present speed data
(Axis 13) Specified acceleration/deceleration
(Axis 13) Pushing current limit value
142
(Axis 13) Control signal
(Axis 13) Status signal
* Relative byte is the byte address relative to the gateway head
*1
The present current value should be the command current value for the stepper motor and be the
feedback current value for the AC servomotor (including AC servomotor connected to SCON-CB).

 Loading...
Loading...




