6.1 Parameter
B6-2
ME0384-4A
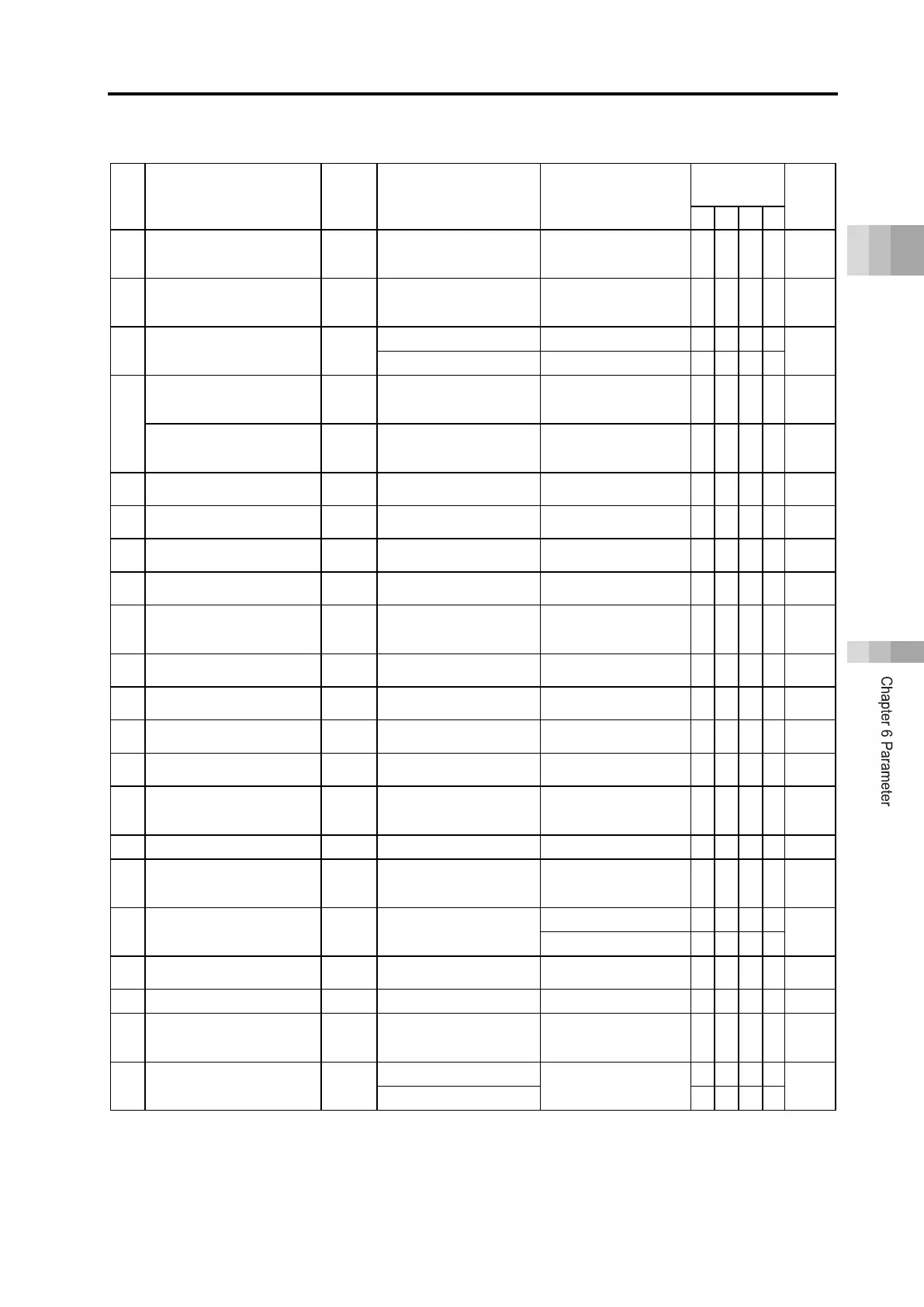
Parameter list (2/5)
No. Name
Unit
(Note 1)
Input range
Default initial value
setting
motor Type
(Note 3)
sections
P A D S
26 PIO Jog velocity
mm/s
(deg/s)
1 to 250 (Maximum speed should
be the upper limit for actuators with
maximum speed less than 250)
In accordance with
actuator
(Note 2)
○ ○ ○ ○ B6-17
28
Excitation signal detection
operation
- 0: Reverse, 1: Forward
In accordance with
actuator
(Note 2)
○ ○ - - B6-17
29
Excitation signal detection time
ms
1 to 999 10 ○ - - -
B6-17
50 to 999 128 - ○ - -
30
Excitation detection type -
1: New mode 1
1 ○ - - - B6-18
Pole sense type -
1: Distance control 1
1 - ○ - - B6-18
31 Velocity loop proportional gain - 1 to 99,999,999
In accordance with
actuator
(Note 2)
○ ○ ○ ○ B6-19
32 Velocity loop integral gain - 1 to 99,999,999
In accordance with
actuator
(Note 2)
○ ○ ○ ○ B6-20
33 Torque filter constant
- 0 to 2,500
In accordance with
actuator
(Note 2)
○ ○ ○ ○ B6-21
34 Push speed
1 ~ Actuator
Maximum push speed
In accordance with
actuator
(Note 2)
○ ○ ○ ○ B6-21
35 Safety velocity
mm/s
(deg/s)
1 to 250 (Maximum speed should
be the upper limit for actuators with
maximum speed less than 250)
100 ○ ○ ○ ○ B6-22
36
Automatic servo OFF delay
time 1
s 0 to 9,999 0 ○ ○ ○ ○ B6-22
37
Automatic servo OFF delay
time 2
s 0 to 9,999 0 ○ ○ ○ ○ B6-22
38
Automatic servo OFF delay
time 3
s 0 to 9,999 0 ○ ○ ○ ○ B6-22
39
Positioning complete signal
output method
-
0 ○ ○ ○ ○ B6-22
43
Home confirmation sensor
input polarity
-
1: a-contact
In accordance with
actuator
(Note 2)
○ ○ - - B6-23
46 Velocity override
% 1 to 100 100
B6-23
47 PIO Jog velocity 2
mm/s
(deg/s)
1 to 250 (Maximum speed should
be the upper limit for actuators with
maximum speed less than 250)
In accordance with
actuator
(Note 2)
○ ○ ○ ○ B6-24
48 PIO inching distance
mm
(deg/s)
0.01 to 1.00
1.00
B6-24
0.10 - - - ○
49 PIO inching distance 2
0.01 to 1.00 0.10 ○ ○ ○ ○ B6-24
50 Load output judgment time ms 0 to 9,999 255 ○ - - ○ B6-24
52 Acc/Dec mode initial value -
1: S-motion
2: First-order delay filter
0 ○ ○ ○ ○ B6-25
53 Stop mode initial value -
0 to 3
0 (not in use)
- ○ ○ ○
B6-25
0 to 7
Note 1 The unit (deg) is applicable to the rotary actuator or lever-type gripper. It will be displayed as (mm) on the teaching tool.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipping, the parameters are set in
accordance with the specification.
Note 3 P: Stepper motor specification, A: AC servo motor specification, D: DC brush-less motor specification, S: 200V AC servo
motor specification

 Loading...
Loading...




