6.1 Parameter
B6-4
ME0384-4A
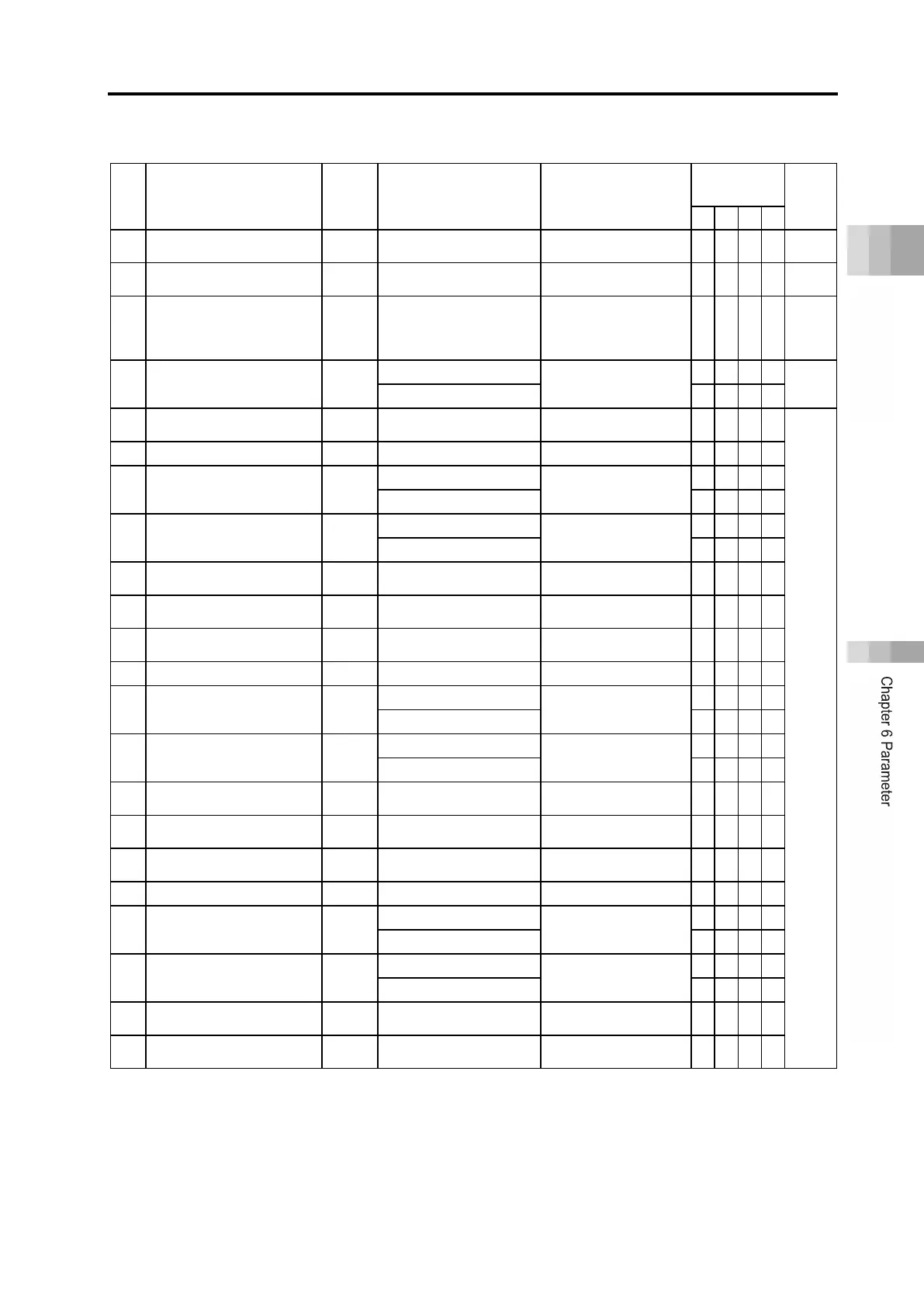
Parameter list (4/5)
No. Name
Unit
(Note 1)
Input range
Default initial value
setting
motor Type
(Note 3)
sections
P A D S
109
Vibration damping No. initial
value
- 0 to 3 0 - ○ - ○ B6-36
110 Stop method during SrvOFF -
0: Sudden stop
1: Decelerating stop
0 ○ ○ ○ ○ B6-36
112 Monitoring mode select
-
1: Monitor function 1
2: Monitor function 2
1 ○ ○ ○ ○ B6-37
113 Monitoring cycle ms
1 to 60,000
1
B6-37
1 to 1,000 - - - ○
120 Servo gain number 1 - 0 to 31
In accordance with
actuator
(Note 2)
- ○ - ○
B6-38
121 Position feed forward gain 1 - 0 to 100 0 - ○ - ○
122 Velocity loop proportional gain 1
-
1 to 27,661
In accordance with
actuator
(Note 2)
1 to 99,999,999 - - - ○
123 Velocity loop integral gain 1 -
1 to 217,270
In accordance with
actuator
(Note 2)
1 to 99,999,999 - - - ○
124 Torque filter constant 1
- 0 to 2,500
In accordance with
actuator
(Note 2)
- ○ - ○
125 Current control width number 1
- 0 to 15
In accordance with
actuator
(Note 2)
- ○ - ○
126 Servo gain number 2 - 0 to 31
In accordance with
actuator
(Note 2)
- ○ - ○
127 Position feed forward gain 2 - 0 to 100 0 - ○ - ○
128 Velocity loop proportional gain 2
-
1 to 27,661
In accordance with
actuator
(Note 2)
1 to 99,999,999 - - - ○
129 Velocity loop integral gain 2 -
1 to 217,270
In accordance with
actuator
(Note 2)
1 to 99,999,999 - - - ○
130 Torque filter constant 2
- 0 to 2,500
In accordance with
actuator
(Note 2)
- ○ - ○
131 Current control width number 2
- 0 to 15
In accordance with
actuator
(Note 2)
- ○ - ○
132 Servo gain number 3 - 0 to 31
In accordance with
actuator
(Note 2)
- ○ - ○
133 Position feed forward gain 3
0 to 100 0
134 Velocity loop proportional gain 3
-
1 to 27,661
In accordance with
actuator
(Note 2)
- ○ - -
1 to 99,999,999
135 Velocity loop integral gain 3
-
1 to 217,270
In accordance with
actuator
(Note 2)
- ○ - -
1 to 99,999,999 - - - ○
136 Torque filter constant 3
- 0 to 2,500
In accordance with
actuator
(Note 2)
- ○ - ○
137 Current control width number 3
- 0 to 15
In accordance with
actuator
(Note 2)
- ○ - ○
Note 1 The unit (deg) is applicable to the rotary actuator or lever-type gripper. It will be displayed as (mm) on the teaching tool.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipping, the parameters are set in
accordance with the specification.
Note 3 P: Stepper motor specification, A: AC servo motor specification, D: DC brush-less motor specification, S: 200V AC servo
motor specification

 Loading...
Loading...




