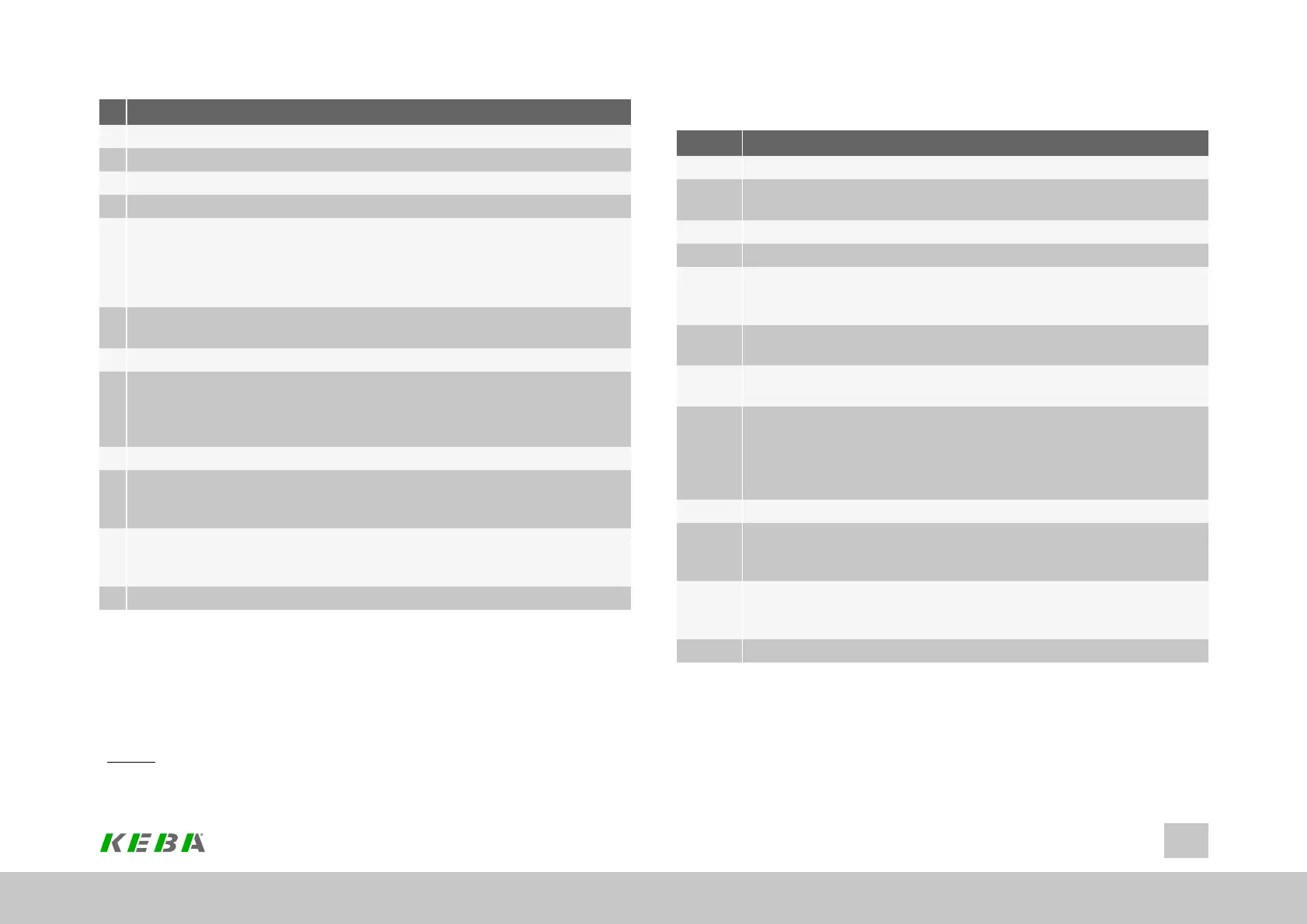
No. Action
1 Openmanualmodewindow
2 Speedcontrolmodecontrolsetting(sethighrigidity,forsmoothrunning)
3 Startcontrol
4 Runmotoratlowspeed(≤1rpm).
5
Set the position source for the teaching, activate teaching: Select
P385[0] - CON_TCoggTeachCon = (6)TeachEpsM or select
P385[0] - CON_TCoggTeachCon = (11)TeachSTPosPcon.
àThe teaching routine begins.
6
Waituntilatleast1motorrevolutioniscompletedintheteachingroutine
(internalfiltertime).
--- CheckP 440[0] - CON_TAB_TabIndexandP 446[0] - CON_TAB_OutVal
7
Withthecontrolstilloperating,theteachingisthenstoppedbycallingthe
calculationfunctiononce:
P 385[0] - CON_TCoggTeachCon = (8)CALC2.Thisimportsallvaluesintothe
internalcompensationtable(bigtablewith4000elements).
8 Stopcontrol
9
Startthecompensation:P 382[0] - CON_TCoggComp = (3)EPSM
Afterthis,theq-currentfeedforwardcontrolbecomesactivewhenthecontrolis
restarted.
10
Savedevicedata.
-Thepositionsourceusedbytheteachingisalsosavedhere.Itwilllaterbe
usedforthecompensationonceagaininexactlythesamemanner.
11 UsethescopetomonitorIsqRef_Comp
7.3.5.7Compensationasafunctionoftheelectricalangle
(EPSRS),bigtable
Teaching routine and compensation à big CompTab (4000)
- Incremental, ‘rotary' recurring position
- Without offset and delta, with tuning, with fader
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
126
7 Control
- (12) Teach epsrs, commutation angle (electrical)
No. Action
1 Openmanualmodewindow
2
Setthespeedcontrolmode(sethighstiffness,forradialtruerunning)Set
speedcontrolmode.
3 Startcontrol
4 Runmotoratlowspeed(≤1rpm).
5
Setthepositionsourcefortheteaching,activateteaching:Select
P 385[0] - CON_TCoggTeachCon = (12)TeachEpsRS-3.àThe
teachingroutinebegins.
6
Waituntilatleast1motorrevolutioniscompletedintheteachingroutine
(internalfiltertime).
---
CheckP 440[0] - CON_TAB_TabIndexandP 446[0] - CON_TAB_
OutVal
7
Withthecontrolstilloperating,theteachingisthenstoppedbycallingthe
calculationfunctiononce:
P 385[0] - CON_TCoggTeachCon = (8)CALC2.
Thisimportsallvaluesintotheinternalcompensationtable(bigtable
with4000elements).
8 Stopcontrol
9
Startthecompensation:P 382[0] - CON_TCoggComp = (3)EPSM
Afterthis,theq-currentfeedforwardcontrolbecomesactivewhenthe
controlisrestarted.
10
Savedevicedata.
-Thepositionsourceusedbytheteachingisalsosavedhere.Itwilllater
beusedforthecompensationonceagaininexactlythesamemanner.
11 UsethescopetomonitorIsqRef_Comp