5Motor
Chapter overview
Pictogram
Navigation ►Projecttree►Devicesetup►Motor
Brief description Thefollowingchapterdescribesthestepsusedtocalculate
parametersfor,identify,andconfiguremotors,aswellastheir
protectionmechanismsandbrake.
Contents
5.1 Motor configuration data 32
5.2 Synchronous motor 33
5.3 Linear synchronous motor 36
5.4 Asynchronous motor 38
5.5 Motor protection 40
5.6 Motor identification 45
5.7 Support for motor filters when using PMSM motors 47
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
32
5 Motor
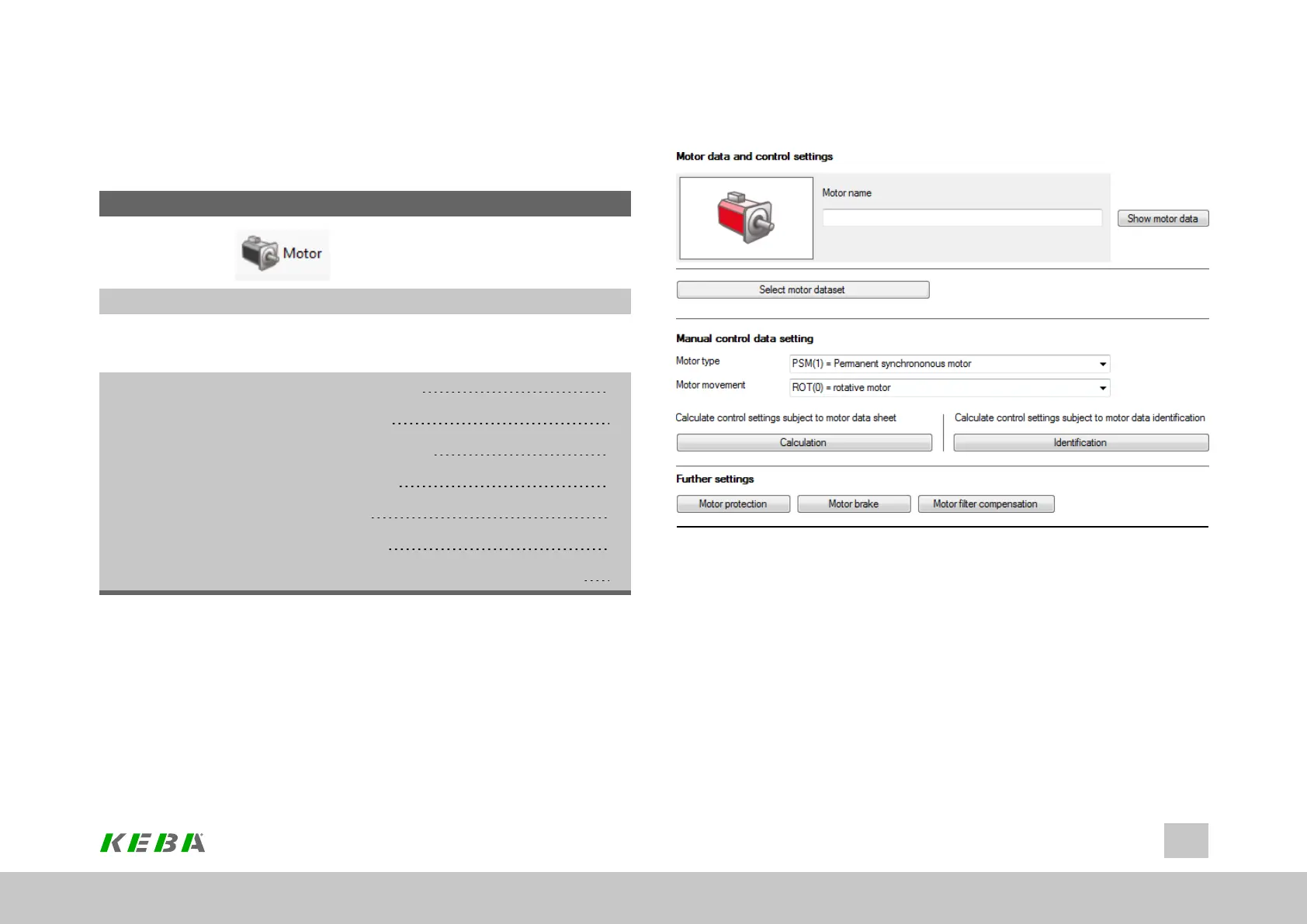
5.1Motorconfigurationdata
Image 5.1: "Motor data and control settings" screen
Each motor can only be operated if its field model and the control parameters are
correctly set. Using the standard motors and encoders from the KEBA motors
catalogue, a system can be commissioned and put into operation very quickly and
easily. Third-party motors can of course be used as well. As the field models of those
motors are not known, the motor must be identified by type or calculated. The
selection is made with the preceding “Motor data and control settings” screen.