LegendforfigureControlStructure
PositionController/Feed
ForwardControl
see7.5Positioncontrollersettings
Positioncontroller see7.5Positioncontrollersettings
Speedcontroller see7.4Speedcontroller
Digitalfilter see7.4.2Digitalfilter
CurrentController see7.3Torquecontroller
Filter/observer
see 7.3.6 Advanced torque control
Fieldweakening,
asynchronous
see7.6Asynchronousmotorfieldweakening
Fieldweakening,
synchronous
see7.7FieldweakeningandLookUpTable(LUT),
synchronousmotor
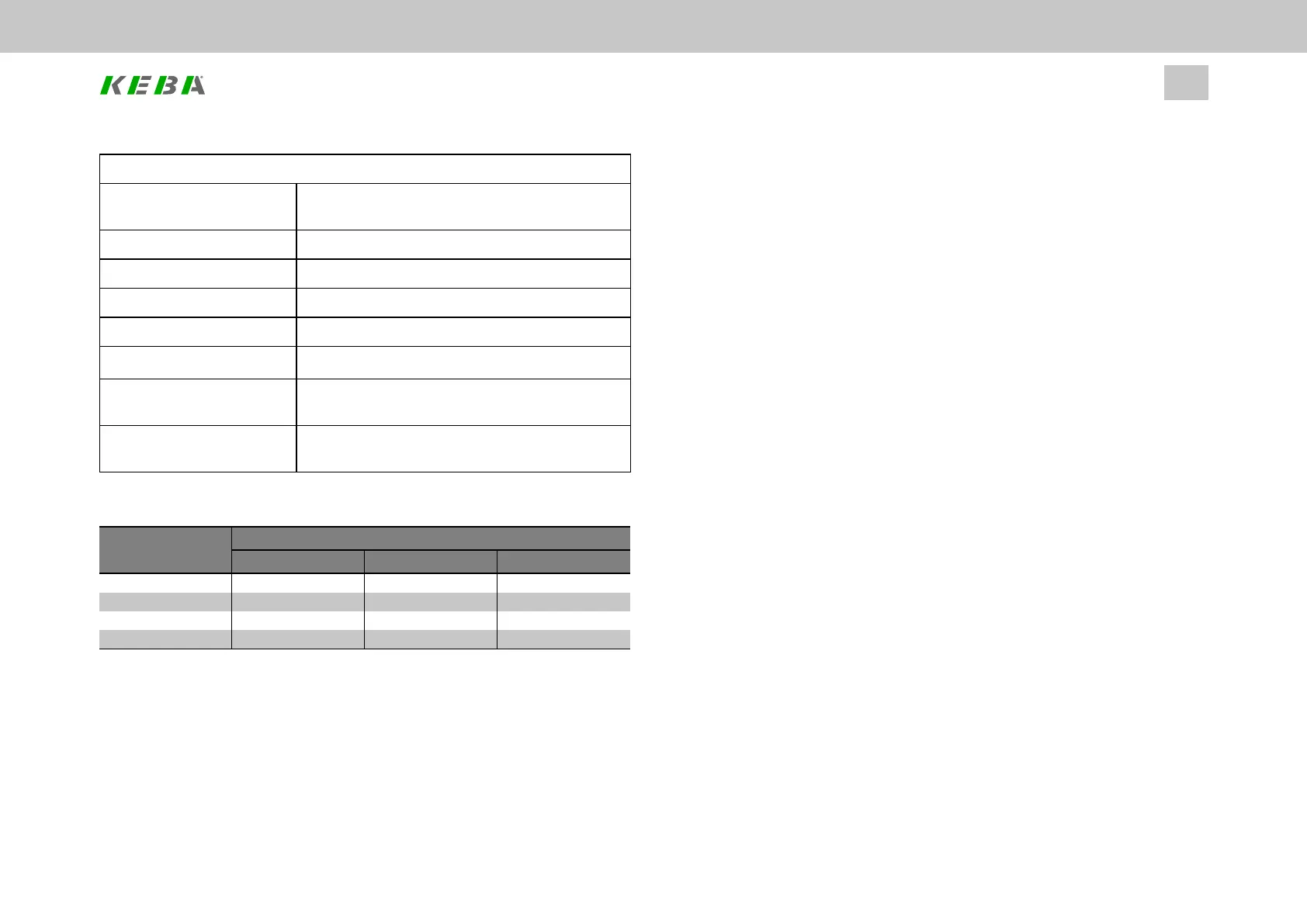
Scanning times of the individual control circuits:
Switching frequency
Sampling time
Current Controller Speed controller Position controller
2kHz 250
µ
s 250
µ
s 250
µ
s
4kHz(12kHz) 125
µ
s 125
µ
s 125
µ
s
8 kHz
62.5µs 125µs 125µs
16kHz 62.5
µ
s 125
µ
s 125
µ
s
Table 7.1: Scanning times of the individual control circuits
The control system is set up in a cascaded configuration. The position, speed and
current controllers are configured in sequence. The sequence of controller setup
must always be observed in controller optimization.
1. Currentcontrollersetup
2. Speedcontrollersetup
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
111
7 Control
3. Settingforpositioncontroller/Pre-control
7.1.1Setting
When using a standard KEBA motor data set, the control parameters are preset for
the specific motor model (external mass inertia = motor inertia). If using third-party
motors, a manual setting must be made for the drive by way of the motor
identification or by calculation in order to define the appropriate control parameters
for the motor model.
7.1.1.1Speedcontrolloop
The setting of the speed controller with the associated filters is dependent on the
motor parameters (moment of inertia, torque/force constant, load inertia/mass,
friction, rigidity of the connection and encoder quality). Consequently, a manual or
automatic optimization is often required.
7.1.1.2Positioncontrolloop
The position control loop is dependent on the dynamism of the underlying speed
controller, on the setpoint (reference) type and on the jerk, acceleration and
interpolation methods.