7.3.7Torquecontrolwithdefinedbandwidth
The controller gain is determined by activating test signals (Autotuning). The
calculations and the relevant autotuning are carried out in the drive controller. The
advanced settings are made in P1530[0] - SCD_SetMotorControl, P1531[0] -
SCD_Action_Sel and P1533[0] - SCD_AT_Bandwidth.
l The3dBbandwidthoftheclosedloopisspecifiedasthebandwidth.
l Advisablebandwidthsettingsat8kHzswitchingfrequencyareupto
approximately2000Hz;at16kHzswitchingfrequencyuptoapproximately
3000Hz.
l TheP-gainCCON_Kpiscalculatedaccordingtotheamountoptimum.
l Theintegral-actiontimeCCON_Tnisinterpolatedbetweentheamount
optimumandthesymmetricaloptimum,sothattheI-contentissufficient,
resultinginreducedinterferenceresponse.
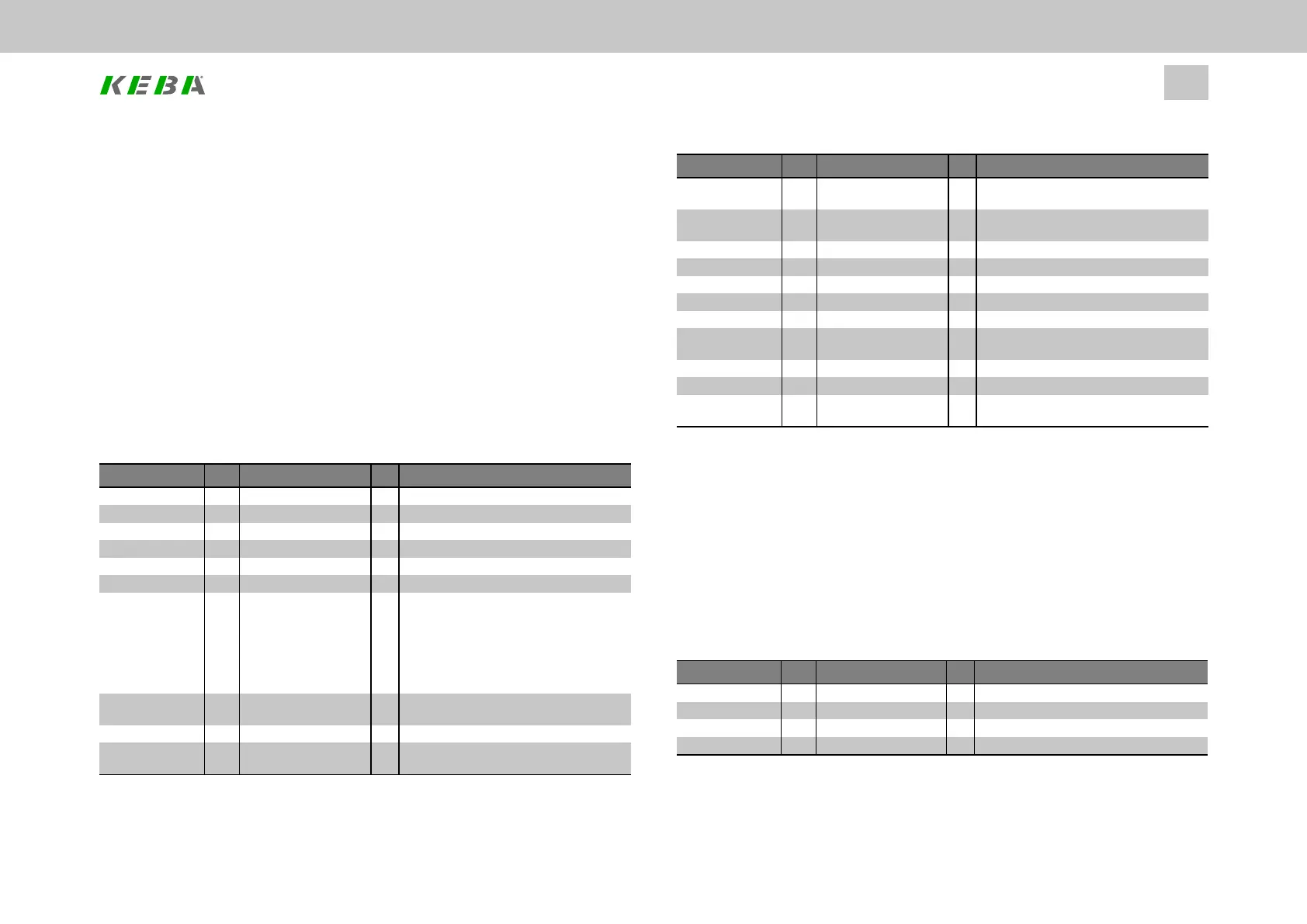
P no. Index Name / Setting Unit Function
1530 0 SCD_SetMotorControl Torquecontrollersettingwithdefinedbandwidth
Fault(-1) Errorduringcalculation
Ready(0) Calculationready
CALC_CON(1) Controlwithmotordatacalculation
CALC_ASM(2) Calculateasmmotorfromrateddata
BANDWIDTH(3) Calculatecurrentcontrollerbybandwidth
DEADBEAT(4) Thissettingparameterizesadead-beat
controller.Thestructureisswitchedto
feedbackwithobserver,theobserveris
designed(toaspecificequivalenttimeconstant
–forsettingseeP 434[0] - CON_CCON_
ObsPara–andthespeedcontrollergainsare
calculatedaccordingly.
1531 0 SCD_Action_Sel Startconditionstodeterminethetorque
controllersettings
FAULT(-1) Selectedfunctionstoppedwithfault
READY(0) Readytostartfunction/lastcallsuccessfully
ended
Table 7.10: “Torque control with defined bandwidth” parameters
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
131
7 Control
P no. Index Name / Setting Unit Function
ENC_OFFSET(1) Startencoderoffsetdetermination(powerstage
willbeswitchedon!)
MOT_ID(2) Startelectricalmotoridentification(powerstage
willbeswitchedon!)
IMP(3) Measureimpedance
LH_TUNE(4) TuneLmcharacteristics
ASM_OP(5) Setoperationpointforasynchronousmotor
BANDWIDTH(6) Tunecurrentcontrollerbybandwidth
MOTPHASE(7) Checkmotor/encoderwiring
COM_ALL(8) Motorid.,enc.-offsetandinertiadetection,
motorphasecheck
J_SUM(9) Identificationofwholeinertia
CANCEL(10) Cancelthecurrentaction
1533 0 SCD_AT_Bandwidth Hz Bandwidthpresetfortorquecontrolloop:
Range:10-4000Hz
Table 7.10: “Torque control with defined bandwidth” parameters (continue)
7.3.8Enhancedfeedforwardcontrolofvoltage
For high-power applications, the current control setting is often limited. If, at the same
time, a high bandwidth is required for the control of test signals, for example, feed-
forward voltage control is helpful.
ID Index Name Unit Description
434 CON_CCON_Para Currentobserverparameters
434 0 TF ms Currentobservertimeconstant
434 1 Kp 1/s Currentobserverfeedbackgain
434 2 Tn ms Currentobserverfeedbacktimeconstant
Table 7.11: Parameter - Enhanced feed forward control