8.5.10Method(7)to(10):
8.5.10.1Method(7):Referencemark,zeropulseandpositive
limitswitch
l Thestartmovementisinthedirectionofthepositive,righthardwarelimit
switch.Bothitandthereferencemarkareinactive.
l Thedirectionofmovementreversesafteranactivereferencemark.Thezero
pointcorrespondstothefirstzeropulseafterthefallingedge.
l Thestartmovementisinthedirectionofthenegative,lefthardwarelimit
switch.Thehomingpointissetatthefirstzeropulseafterafallingedgefrom
thereferencemark.
l Thefirstzeropulseafterpassingthereferencemarkisthezeropoint.
Image 8.51: Reference mark, zero pulse and positive limit switch
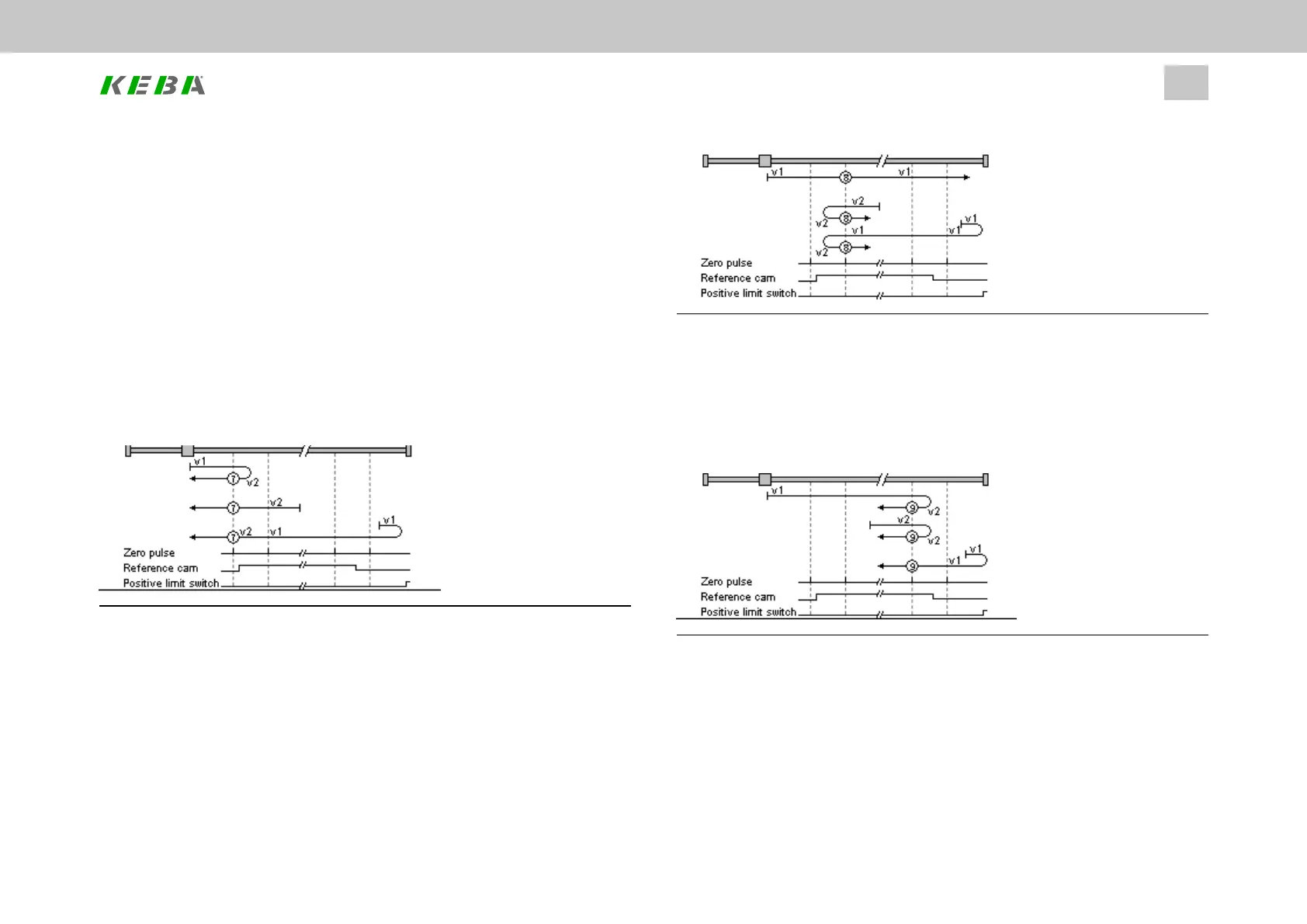
8.5.10.2Method(8):
l Thezeropointisthefirstzeropulseifthereferencemarkisactive.
l Thedirectionofmovementreversesafterafallingedgefromthereference
mark.Thezeropointcorrespondstothefirstzeropulseafterarisingedge
fromthereferencemark.
l Thedirectionofmovementreverseswhenthereferencemarkhasbeen
passed.Thezeropointcorrespondstothefirstzeropulseafterarisingedge.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
261
8 Motion profile
Image 8.52: Zero point corresponds to first zero pulse
8.5.10.3Method(9):
l Thedirectionofmovementchangeswhenthereferencemarkbecomes
inactive.Thezeropointcorrespondstothefirstzeropulseafterarisingedge.
l Thezeropointisthefirstzeropulseifthereferencemarkisactive.
Image 8.53: The direction of movement changes when the reference mark becomes
inactive.
8.5.10.4Method(10):
l Oncethereferencemarkhasbeenpassed,thefirstzeropulseafterthe
fallingedgeisthezeropoint.