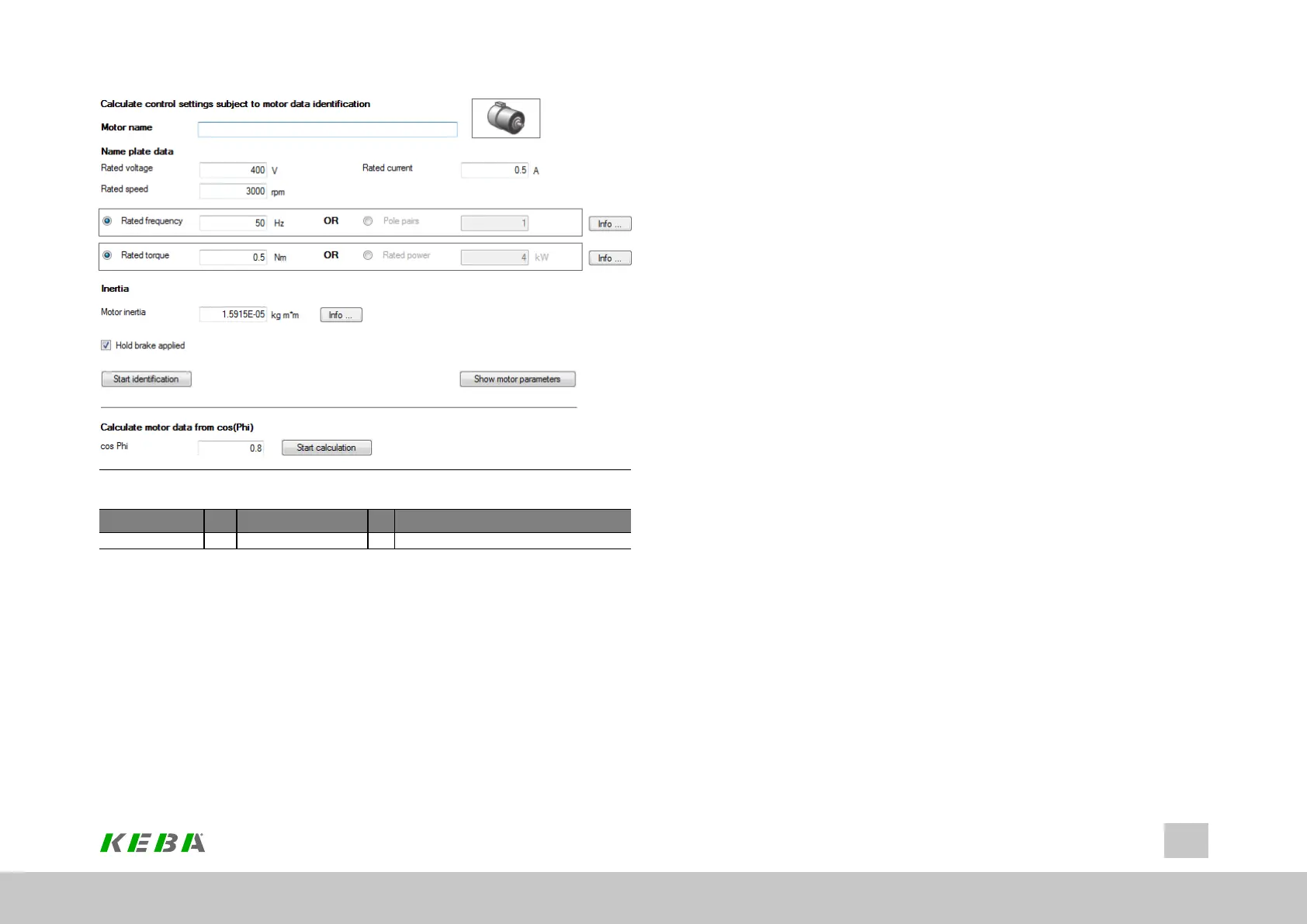
Image 5.13: “Motor identification" screen for an asynchronous motor
ID Index Name Unit Description
1531 0 SCD_Action_Sel Self-commissioningactionselection
Table 5.9: “Motor identification” parameters
When the Rating plate data have been entered in the screen, identification is started
by clicking the "Start identification" button. A safety notice must be confirmed with a
tick (check mark).
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
46
5 Motor
5.6.1Synchronousmotoridentification(rotaryandlinear)
l Enterthemotordata.
l Click"Identification"button
l Currentcontrollertuning:optimizationofthecurrentcontrollerisdone
automatically.
5.6.2Asynchronousmotoridentification
l Currentcontrollertuning
l Measurementof:P 470[0] - MOT_Rstat:Statorresistance,P 476[0] - MOT_
Rrot:Rotorresistance,P 471[0] - MOT_Lsig:Leakageinductance
l MaximumeffectivecurrentIdmaxP 474[0] - MOT_LmagIdNom
l Operatingpointcalculation:P 462[0] - MOT_FluxNom:Nominalflux,P 340
[0] - CON_FM_Imag:Magnetizingcurrent
l Calculationof:current,speedandpositioncontrolparameters
l Clickthe"Startcalculation"buttontodeterminetherotorresistanceP 476[0] -
MOT_RrotandleakageinductanceP 471[0] - MOT_Lsig.
l Measurementofthesaturationcharacteristic(tablevaluesofthestator
inductanceP 472 - MOT_LSigDiff);
Measurementsaretakenuptofourtimesratedcurrent,providedthepower
stagecurrentpermitsitatstandstill.Ifthisisnotthecase,themeasurementis
madeusingacorrespondinglysmallercurrent.
l P 340[0] - CON_FM_ImagMagnetizingcurrent