ID Index Name Unit Description
2262 MPRO_402_
HomingSpeeds
6099HDS402homingspeeds
2262 0 SpeedSwitch rev/min Camsearchspeed
2262 1 SpeedZero rev/min Zeropulsesearchspeed
2263 0 MPRO_402_
HomingAcc
rev/min/s 609AHDS402homingacceleration
Table 8.20: “Homing” parameters (continue)
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
254
8 Motion profile
8.5.2Method(-13):Absoluteencoder
Method (-13) works in a similar way to method (-5) (see Section "Method (-5):
Absolute encoder" on page 257). However, in this method the home offset is used to
define the machine zero point, while in method (-5) it is used to define the offset
relative to the encoder’s absolute position
The following is the difference between the machine zero points for each method:
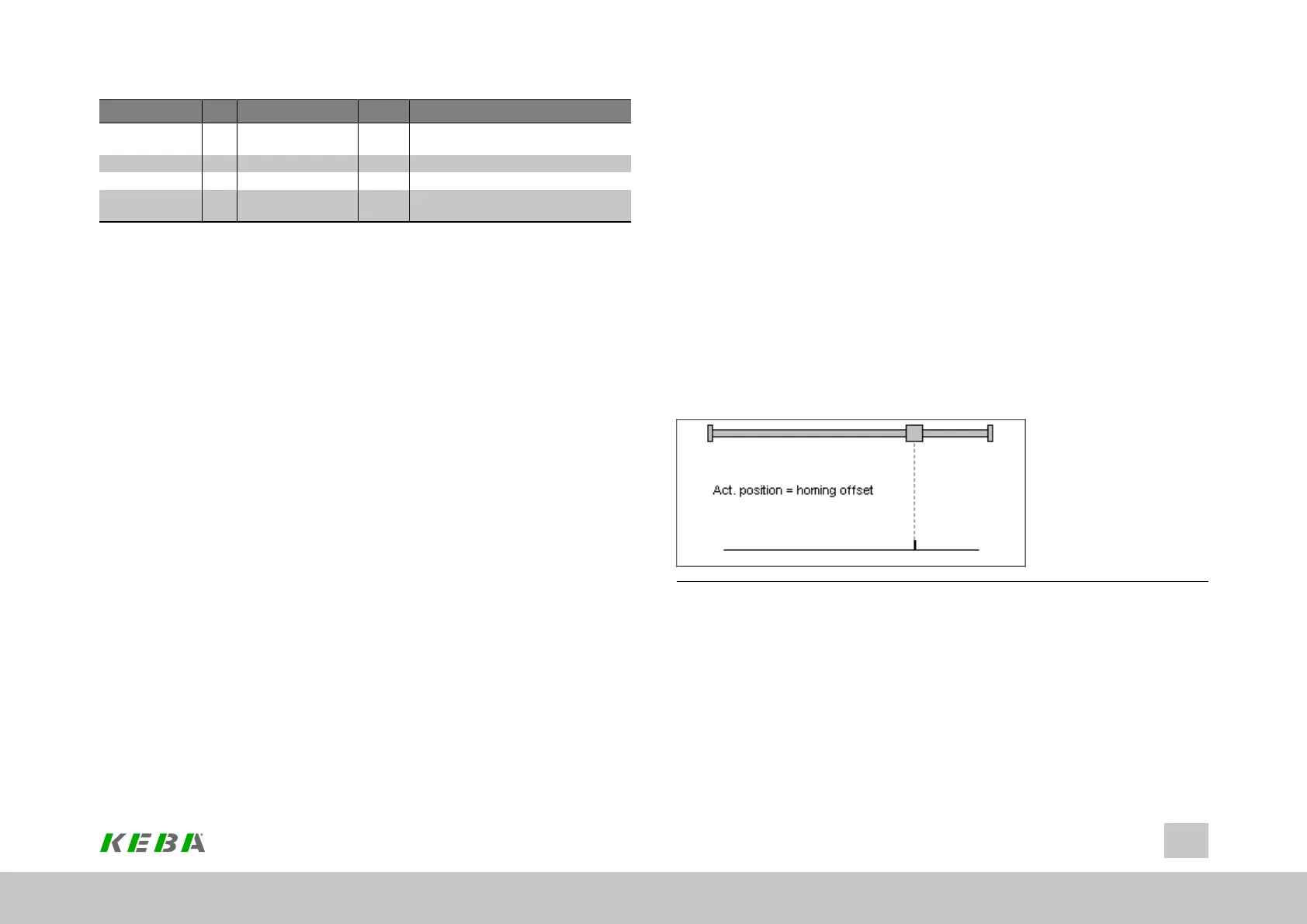
l Method(-13):Actualvalue=Homeoffset
l Method(-5):Actualvalue=Absoluteencoderposition(firstneedstobe
determinedwithhomeoffset=0)+newhomeoffset
Method (-13) is significantly easier to use, as it eliminates the need to determine the
encoder’s absolute position at the machine zero point and back-calculate the actual
position.
Image 8.39: Set the machine homing point