ID Index Name Value Unit Description Type PDO
2841 0 HYD_Ctrl 0000000000100000b Hydraulic:systemcontrol uint16 x
2842 0 HYD_State 0000000000000000b Hydraulic:Statusofthecontrol
functions
uint16 x
Table 7.95: Control and status Word
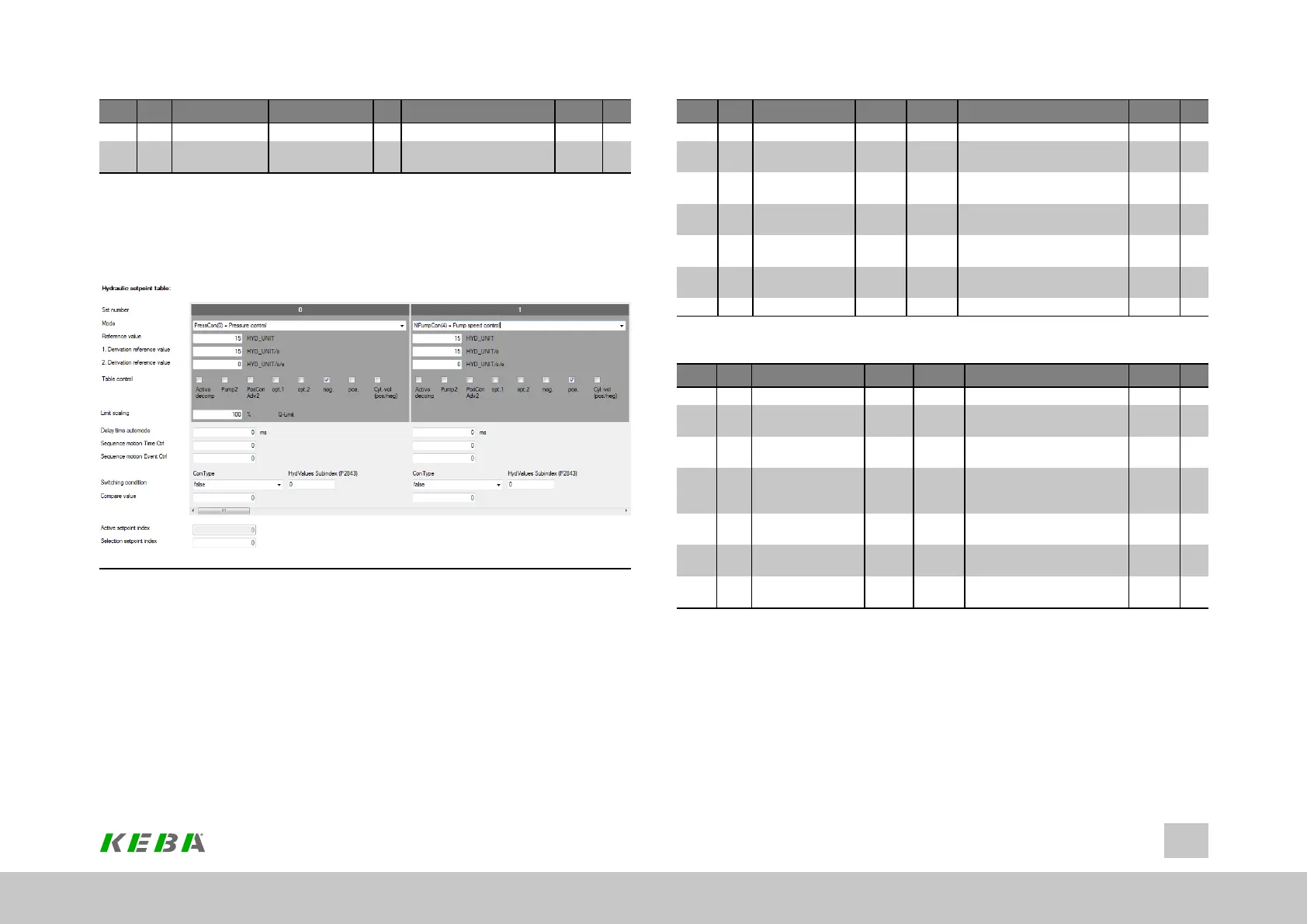
Reference values, ramp and valve settings can now be made in the motion block
table.
Image 7.89: “Motion block table” screen
Motion block 0 is enabled immediately after starting the controller. The various
motion blocks can now be selected via bit 0 to bit 4 of the hydraulic control word.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
216
7 Control
ID Index Name Value Unit Description Type PDO
2854 0 HYD_PumpRef 0 rpm Hydraulicpumpspeedreference float32 x
2855 0 HYD_PumpAcc 0 rpm/s Hydraulic:Accelerationofthe
pumpspeed
float32 x
2856 0 HYD_PumpDec 0 rpm/s Hydraulic:Decelerationofthe
pumpspeed
float32 x
2857 0 HYD_Ref 15 HYD_
UNIT
Hydraulic:Setpointforvolumetric
flowrate/pressure/speed/position
float32 x
2858 0 HYD_dRef 15 HYD_
UNIT/s
Hydraulic:1stsetpointderivative float32 x
2859 0 HYD_d2Ref 0 HYD_
UNIT/s/s
Hydraulic:2ndsetpointderivative float32 x
2860 0 HYD_ConMode PRESS (HydraulicControlMode) uint8 x
Table 7.96: Table index 0 settings
ID Index Name Value Unit Description Type PDO
2854 1 HYD_PumpRef 0 rpm Hydraulicpumpspeedreference float32 x
2855 1 HYD_PumpAcc 0 rpm/s Hydraulic:Accelerationofthe
pumpspeed
float32 x
2856 1 HYD_PumpDec 0 rpm/s Hydraulic:Decelerationofthe
pumpspeed
float32 x
2857 1 HYD_Ref 15 HYD_
UNIT
Hydraulics:Setpointfor
volumetricflow
rate/pressure/speed/position
float32 x
2858 1 HYD_dRef 15 HYD_
UNIT/s
Hydraulic:1stsetpointderivative float32 x
2859 1 HYD_d2Ref 0 HYD_
UNIT/s/s
Hydraulic:2ndsetpointderivative float32 x
2860 1 HYD_ConMode PUMP_
SPEED
(HydraulicControlMode) uint8 x
Table 7.97: Einstellung Tabellenindex 1
7.11.14Example:Hydraulicpositioncontrol
This example shows which parameters must be set in order to control the position
and speed of a hydraulic cylinder with a linear encoder. The motor and encoder
must be parametrised before the hydraulic control settings can be made.