5.3Linearsynchronousmotor
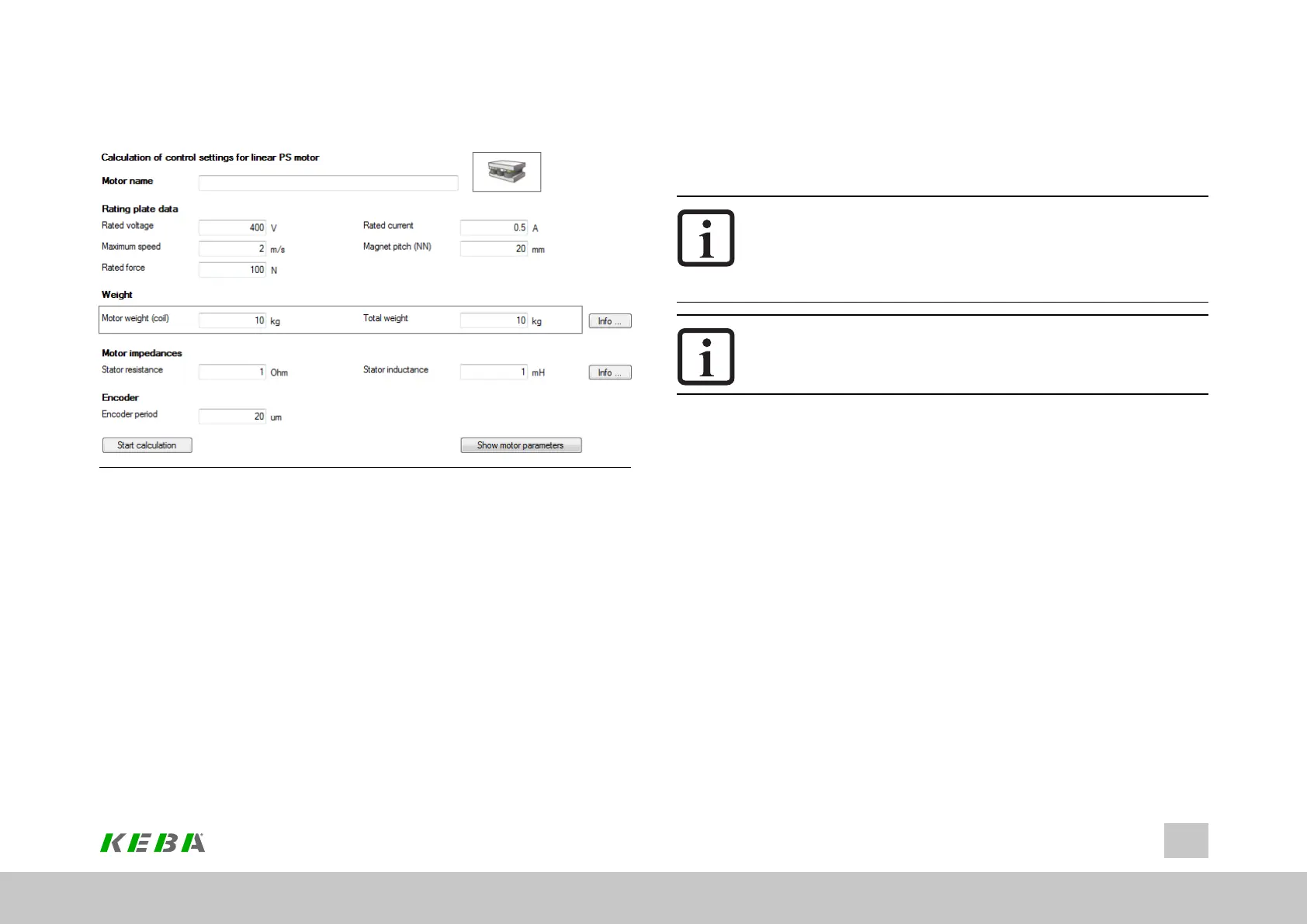
Image 5.4: “Linear synchronous motor settings” screen
There are two methods of creating a motor data set for the linear synchronous motor.
l Variant1:Motorcalculation
l Variant2:Motoridentification(seeSection"Motoridentification"onpage45)
Variant 1: Motor calculation
l Enterthemotordata
Themotordatarelevanttothecalculationmustbeenteredfromthedata
sheet.
l Clickon“Startcalculation”.
l IfthemomentofinertiaofthemotorP 461 - Mot_Jisnotknown,avalue
roughlycorrespondingtothemotor'smomentofinertiamustbeapplied.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
36
5 Motor
l ThecalculationprocesscanbemonitoredintheKeStudioDriveManager5
viathemenu,View,Messages.
l Calculationofoperatingpoint:FluxP 462 - MOT_FLUXNom
l Calculationof:current,speedandpositioncontrolparameters
NOTE
l P 490 - MOT_ISLinRot =LIN(1):Theparameterautomaticallysets
thenumberofpolepairsforthemotortoP 463 - Mot_PolePairs =
1.Asaresult,aNorthtoNorthpolepitchcorrespondstoone
virtualrevolution(P 492 - Mot_MagnetPitch).
NOTE
l Allexistingmotorparametersareoverwritten.
Calculated values
l Translationofthelinearnominalquantitiesintovirtualrotarynominal
quantities
l Defaultvaluesforautocommutation
l Encoderlinespervirtualrevolution
l Fluxsettings(includingfortorqueconstant)
l ControlsettingsforPIcurrentcontroller:thecurrentcontrollerisdimensioned
basedontheactualswitchingfrequencyset.
l PIspeedcontrollerandpositioncontrollergain:Amoderatelyrigid
mechanismandmomentofinertiamatchingfromloadtomotorwitharatioof
1:1isassumedhere.
l Thedefaultvalueforspeedtrackingerrormonitoringcorrespondsto50%of
thenominalspeed.
l V/Fcharacteristic