5.5.2I²tmonitoringsynchronousmotor
A synchronous motor by design has lower loss than an asynchronous motor,
because permanent magnets replace the magnetizing current. It is normally not
internally cooled, but discharges its heat loss by internal convection. For that reason
a synchronous motor has a different characteristic to an asynchronous motor. It is
necessary to adapt the I
2
t characteristic because the factory setting mostly does not
exactly map the present motor.
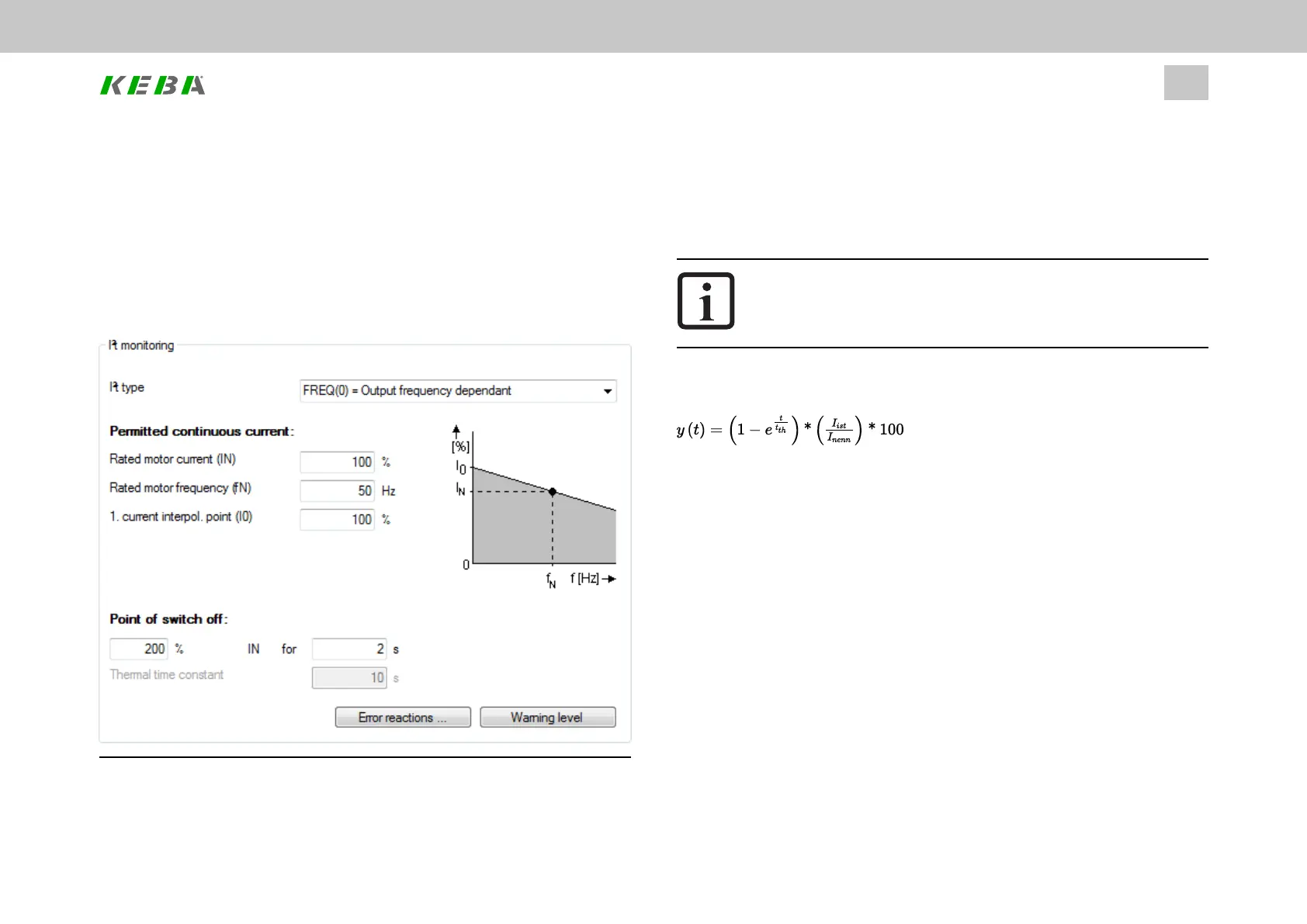
Image 5.9: “I²T monitoring” screen for a synchronous motor
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
43
5 Motor
If the I
2
t type is set to "THERM(1) = Thermal time constant dependent", all settings
apart from the thermal time constant are disabled.
If the integrator exceeds its limit value, the error E-09-01 is triggered. The current
value of the integrator is indicated in P701[0] - Mon_ActValues.
NOTE
l ThelimitsarespecifiedinServocontrolleraspercentagesofthe
ratedquantities(e.g.current,torque,speed,...)ofthemotor.The
defaultsrelateto100%oftheratedquantities.
Calculation of capacity utilization via exponential function with thermal
time constant of motor:
Setting of I
2
t type:
l P 735[0]=“FREQ(0)=Outputfrequency-dependent":KEBA-specifici(f)
evaluation
l P 735[0]=“THERM(1)=Thermaltimeconstant-dependent”:Evaluationbased
onthermaltimeconstanti(Tth)
l ThermaltimeconstantP 733[7] - Tthermin[s]
l Theshut-offthresholdis110%(reductionincurrentnoise)