encoder’s multi-turn value range from 0 to max will be mapped to 0 to max; the
second half of the measuring range will be initialized as positive; in this case, the
point of discontinuity will be found at 0.
If you set MTEnableto1, you can use an available multi-turn encoder as a single-
turn encoder (this is only needed for testing purposes).
If you set EncObsMinto0, SinCos wire break monitoring will be disabled. The
default value is 0.2 (20%) and stands for a calculated amplitude value (calculated
using the two SinCos signals) of x = sqrt(a^2 + b^2). If the SinCos signals are equal
to approx. 1 Vss when compared, approx. 0.8 will be calculated here (approx. 80%
magnitude at the A-D converters; approx. 0.25Vss SinCos will yield approx. 0.2 here
(20% magnitude at the A-D converter)). The error threshold can be set with
EncObsMin within a broad range.
NOTE
l AstherearevariousprotocolmodesavailableforSSIencoders
(with/withoutwirebreakmonitoring,with/withoutparitybit,etc.),
consultwithyourprojectsupervisorortheHelplineprovidedby
KEBAbeforeusinganyspecialSSIprotocolmodes.
6.5.2BiSS(cyclical)X7
Ch1: BiSS (6) - Cyclical BiSS
BiSS is an ‘open' digital encoder interface, meaning it is not manufacturer-specific.
Nonetheless, in the present case, only selected encoder types are supported.
More details on BiSS can be found at www.biss-interface.com.
A point-to-point connection from the master to a single-slave device is supported.
The protocols "BiSS B" and "BiSS C unidirectional" are supported there.Moreover,
the protocol "BiSS C" is supported with some restrictions, depending on what the
operation of the selected encoder demands.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
61
6 Encoder
A special software version of the ServoOne is required for operation of the BiSS
encoder interface (EnDat and SSI encoders are not supported in it).
For known encoder types (a few rotary encoder types from the manufacturer
Hengstler), the values for the parameters P 543[0] - ENC_CH1_MultiT and P 544[0]
- ENC_ CH1_ SingleT are read from the BiSS encoder and are written to these
parameters.
The value for the parameter P 542[0] - ENC_CH1_Lines is also read from the BiSS
encoder, but is not subsequently used: in the present case, a purely digital
evaluation of the BiSS encoder takes place (with no evaluation of SinCos tracks).
The parameters P 547[0] - ENC_CH1_MTBase, P 548[0] - ENC_CH1_MTEnable
and P 616[0] - ENC_CH1_CycleCount are not evaluated here: they are therefore not
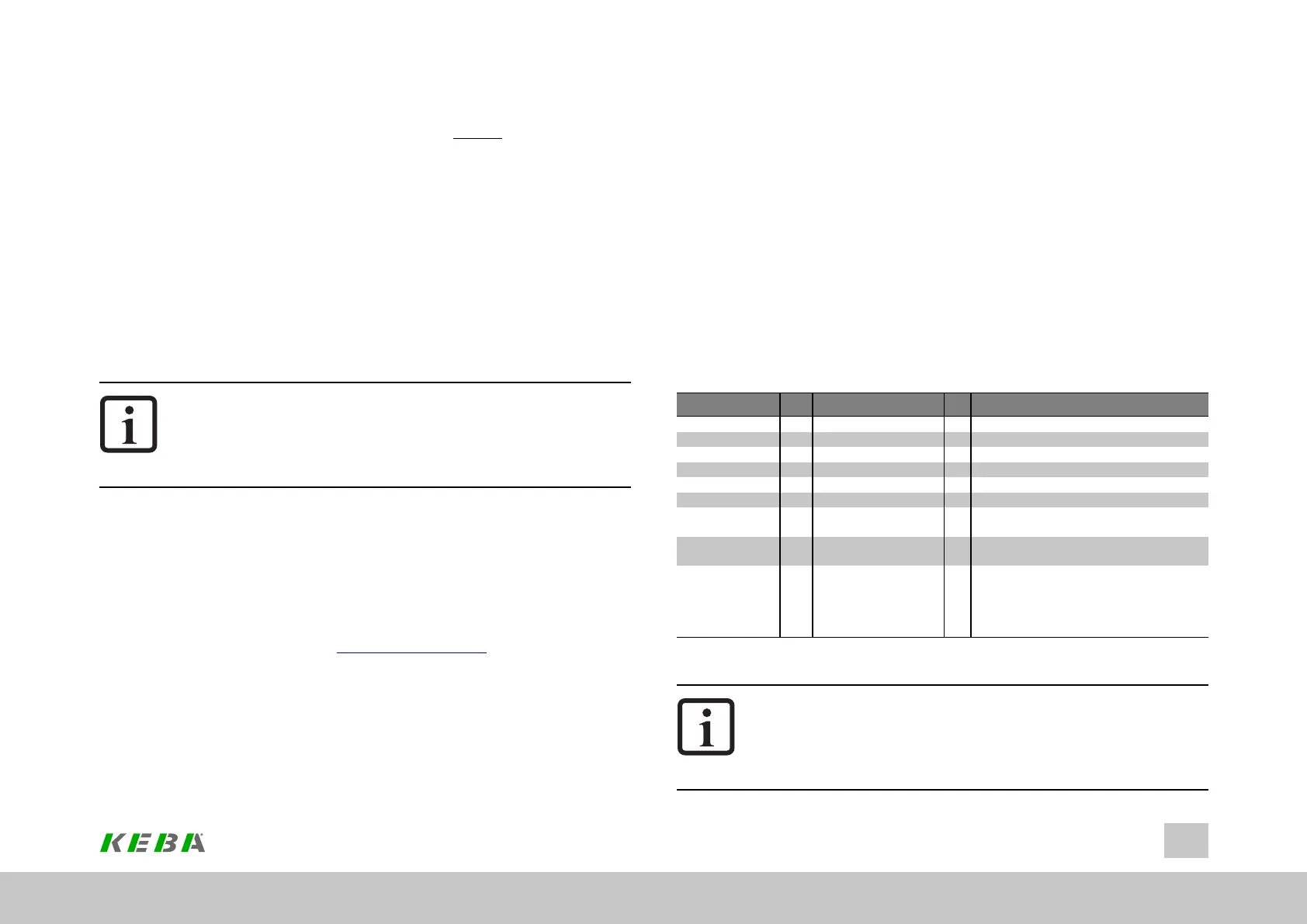
listed in the following table.
ID Index Name Unit Description
505 0 ENC_CH1_Sel=6 =BISS(6)
543 0 ENC_CH1_MultiT Numberofmulti-turnbitsforthedigitalinterface
544 0 ENC_CH1_SingleT Numberofsingle-turnbitsforthedigitalinterface
598 0 ENC_CH1_Position inc Positionencoderchannel1
618 0 ENC_CH1_AbsCRCPoly CRCpolynomialforBiSSabsoluteencoder
619 0 ENC_CH1_AbsCRCInv CRCforBISSabsoluteencoderinverted
620 0 ENC_CH1_AbsErrMask MaskEncoderStatusWordforstandardEncoder
Error
621 0 ENC_CH1_AbsWarnMask MaskEncoderStatusWordforEncoderStatus
Error
622 0 ENC_CH1_
BISSProtocolType
SelectBISSencoderprotocoltypeAUTO,BISS-
BoderBISS-C
0:Autodetect
1:BISS-B
2:BISS-C
Table 6.7: BiSS parameters (optional)
NOTE
l AstherearevariousprotocolmodesavailableforBiSSencoders
(BiSSB,BiSSC,BiSSCunidirectional),makesuretoconsultwith
yourprojectsupervisorortheKEBAHelplinebeforeusingBiSS
encoderswithspecialBiSSprotocolmodes.