Image 9.10: “Status of digital outputs” screen
ID Index Name Unit Description
143 0 MPRO_OUTPUT_STATE Statusofdigitaloutputs
Table 9.10: “Status of digital outputs” parameters
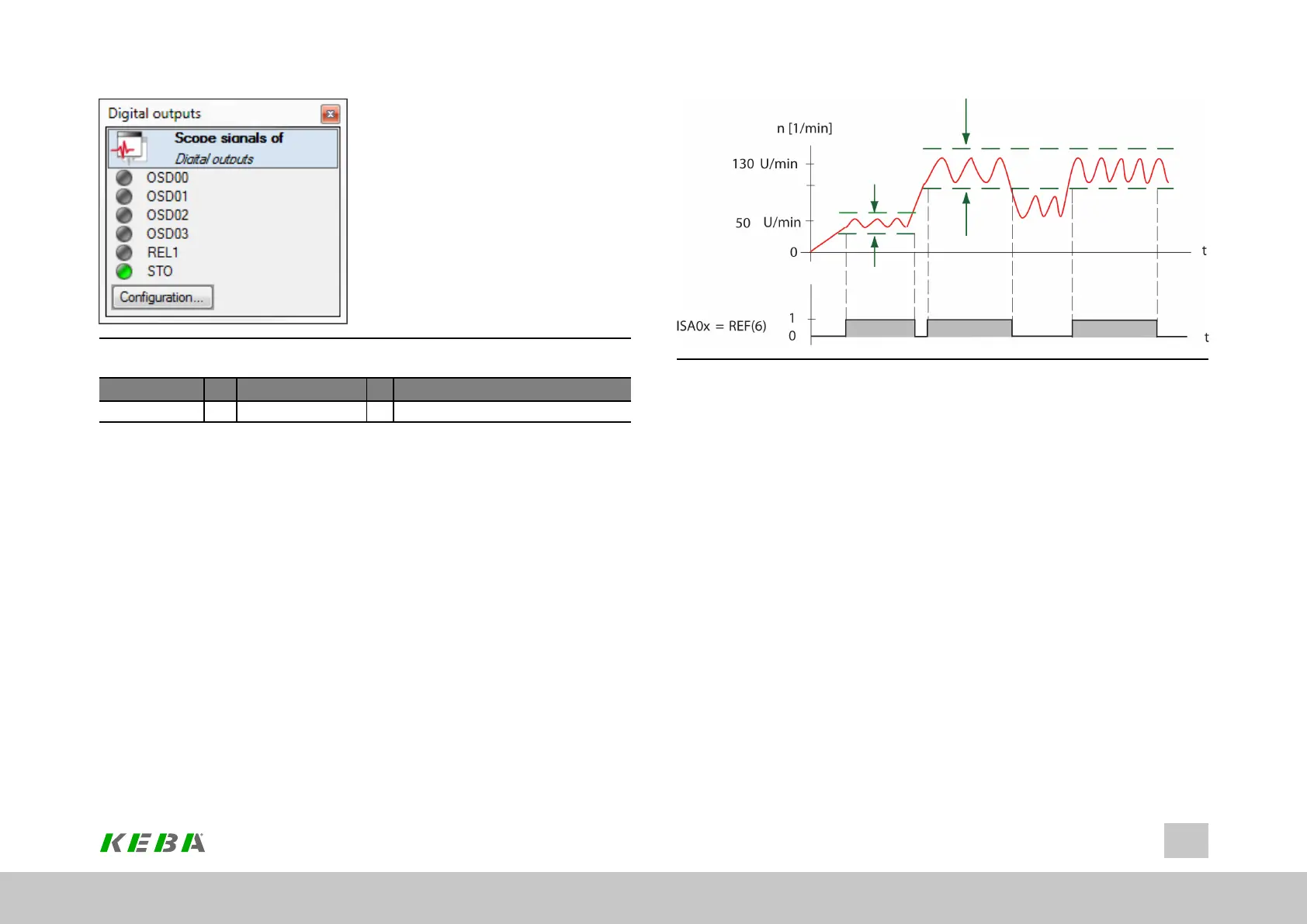
9.3.5ReferencereachedREF(6)
If a digital output is set to “REF(6) = Target reached / Reference reached” for torque
and speed control as well as positioning, a range can be defined in which the actual
value may deviate from the reference without the "Reference reached REF(6)"
message becoming inactive. Reference value fluctuations caused by reference input
are thus taken into account.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
314
9 Inputs/Outputs settings
Image 9.11: Threshold definition
9.3.6ReferencelimitationLIMIT(14)
The "LIMIT(14)" function for a digital output signals when a setpoint has reached its
limit. In this case the output is set. The limit values for maximum torque and
maximum speed depend on the preset control system.
Torque control
Limit value monitoring becomes active when the torque reference exceeds the
maximum torque (see Section "Limitations / Thresholds" on page 324).
Speed control
Limit value monitoring becomes active when the speed reference value exceeds the
maximum speed (see Section "Limitations / Thresholds" on page 324).