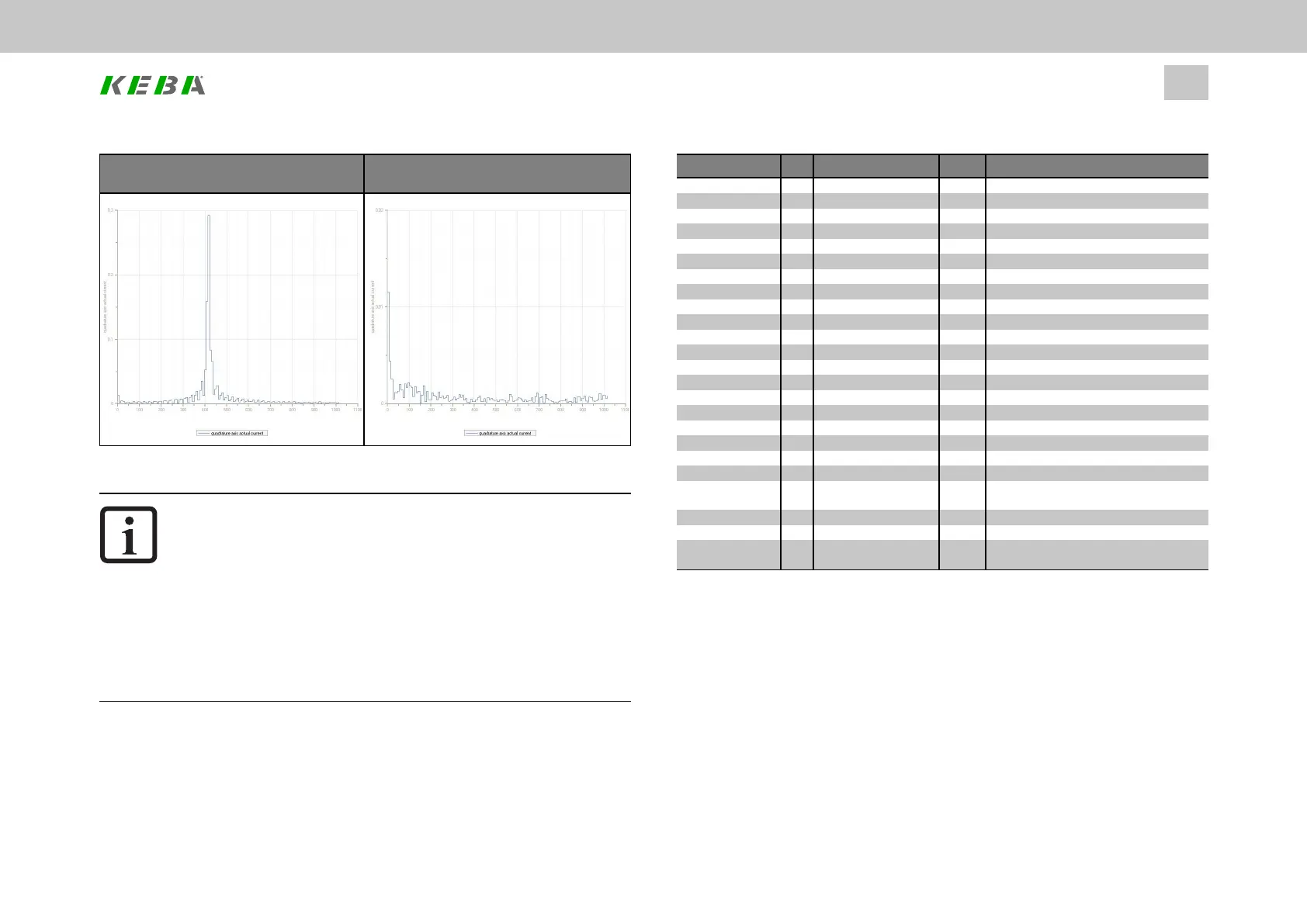
FFT without filtering FFT with filtering
Table 7.16: FFT transformation
NOTE
l Notethatthefiltersnotonlyhaveaneffectontheamountbutalso
onthephaseofthefrequencyresponse.Atlowerfrequencies
higher-orderfilters(PT3,PT4)shouldnotbeused,asthephase
withinthecontrolbandwidthisnegativelyinfluenced.
l ThecoefficientscanalsobespecifieddirectlyviaparameterP 327
- CON_SCON_FilterPara.Theytakeeffectdirectly,sochanging
themisonlyrecommendedwhenthecontrolisswitchedoff.
l Alargebandwidthwillresultinalowerattenuationofthecut-off
frequency.
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
139
7 Control
ID Index Name Unit Description
325 CON_SCON_FilterFreq Filterfrequenciesofdigitalfilter
325 0 CON_SCON_FilterFreq Hz 1stcenter/cutoff
325 1 CON_SCON_FilterFreq Hz 1stwidth
325 2 CON_SCON_FilterFreq Hz 2ndcenter/cutoff
325 3 CON_SCON_FilterFreq Hz 2ndwidth
326 0 CON_SCON_FilterAssi Digitalfilterdesignassistant
327 CON_SCON_FilterPara Coefficientsofdigitalfilter
327 0 FilterParab0 b0*x(k)
327 1 FilterParab1 b1*x(k-1)
327 2 FilterParab2 b2*x(k-2)
327 3 FilterParab3 b3*x(k-3)
327 4 FilterParab4 b4*x(k-4)
327 5 FilterParaa1 a1*y(k-1)
327 6 FilterParaa2 a2*y(k-2)
327 7 FilterParaa3 a3*y(k-3)
327 8 FilterParaa4 a4*y(k-4)
1550 0 SCD_NotchType AdaptiveNotchfilter:Method
1551 0 SCD_NotchCntl AdaptiveNotchfilter:Controlword
1552 SCD_NotchFreq AdaptiveNotchfilter:Frequencies
1552 0 SCD_NotchFreq Hz AdaptiveNotchfilter:Frequency
1552 1 SCD_NotchLambda Hz/min^-
2
AdaptiveNotchfilter:Coefficient
1552 2 SCD_NotchMinFreq Hz Adaptivenotchfilter:Minimumfrequency
1552 3 SCD_NotchMaxFreq Hz Adaptivenotchfilter:Maximumfrequency
1552 4 SCD_NotchDeltaFreq Hz AdaptiveNotchfilter:Maximumfrequency
change(ineachiteration)
Table 7.17: “Speed controller - Digital filter” parameter
7.4.3AnalysisofSpeedcontrol
The speed controller is executed as a PI controller. The gain (P-component) and the
integral-action time (I-component) of the individual controllers are programmable.
In order to optimize the speed control loop, two rectangular reference steps are
preset. For automatic controller optimization the step response and transfer function
wizards are available.