ID Index Name Unit Description
434 3 Decoup % Scaledecoupling
434 4 StatFF % Scalestaticvoltagefeed-forward
434 5 DynFF % Scaledynamicvoltagefeed-forward
434 6 FilterFF ms Filtervoltagefeed-forward
471 0 MOT_Lsig mH Motorleakageinductance(ASM)/stator
inductance(PSM)
472 MOT_LsigDiff q-axisstatorinductancevariation(relativeto
MOT_Lsig)
472 0 Lsig_q@I0 % Inductance@CurrentI0
472 1 Lsig_q@I1 % Inductance@CurrentI1
472 2 Lsig_q@I2 % Inductance@CurrentI2
472 3 Lsig_q@I3 % Inductance@CurrentI3
472 4 CurrentI0 % CurrentI0relativetoMOT_CNom
472 5 CurrentI1 % CurrentI1relativetoMOT_CNom
472 6 CurrentI2 % CurrentI2relativetoMOT_CNom
472 7 CurrentI3 % CurrentI3relativetoMOT_CNom
1976 0 CON_CCON_VFF Selectcurrentcontrol/limitationmode
Table 7.11: Parameter - Enhanced feed forward control (continue)
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
132
7 Control
P 434[6] FilterFF
P 434[3] decoup
d/dt
isqref
isdref
isd
—
—
isq
Pi-Regler
Kp,Tn, LsigDiff(isq)
-ω* Lsig*LsigDiff(isq)
Lsig*LsigDiff(isq)
Error-Voltage-Model
ω* Lsig*LsigDiff(isq) + ω*Ψ
Pi-Regler
Kp,Tn, LsigDiff(isq)
P 434[3] decoup P 434[4] StatFF
P 434[5] DynFF
d,q -> abc Transformation, PWM, Motor
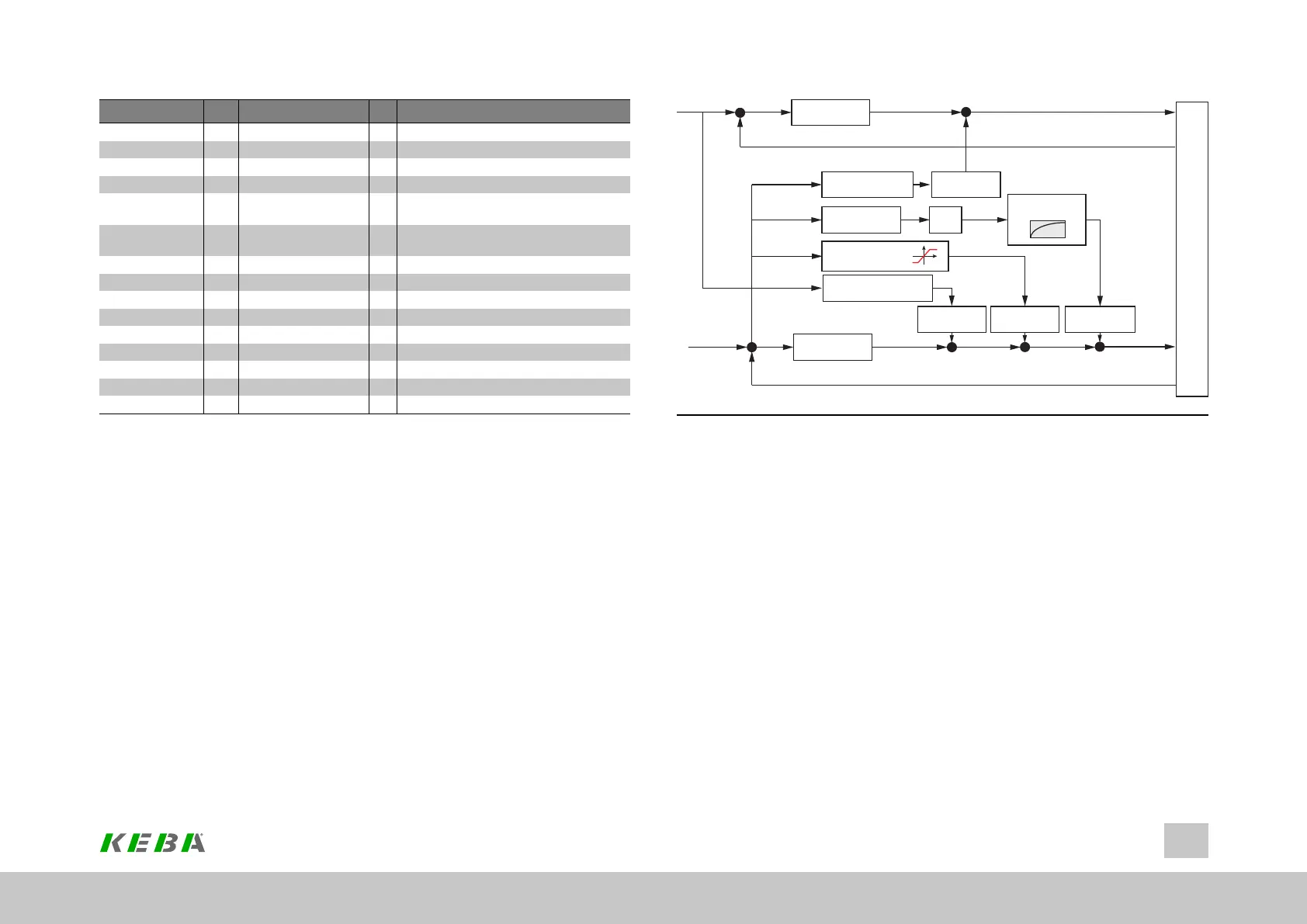
Image 7.19: Extended pre-control structure
Image 7.19: Extended pre-control structure shows the extended pre-control
structure. This is activated with P 1976 = ON. This delays the current setpoint by one
controller cycle; this is not suitable for high-performance speed control.
The feed forward control of the voltage drop across the stator resistance of the
machine depends on P 470 MOT_Rstat. The feed forward control of the fault voltage
of the power stage depends on P 302 CON_SwitchFreq. Both can be subjected to
feed forward control and scaled with P 434.4.
The voltage to change the current over the stator inductance depends on P 471
MOT_Lsig. The feed forward control can be scaled with P 434.5.
P 434.6 enables filtering of the voltage thus set, which reduces noise. Do not set this
filter too high, otherwise there will no longer be an increase in bandwidth.