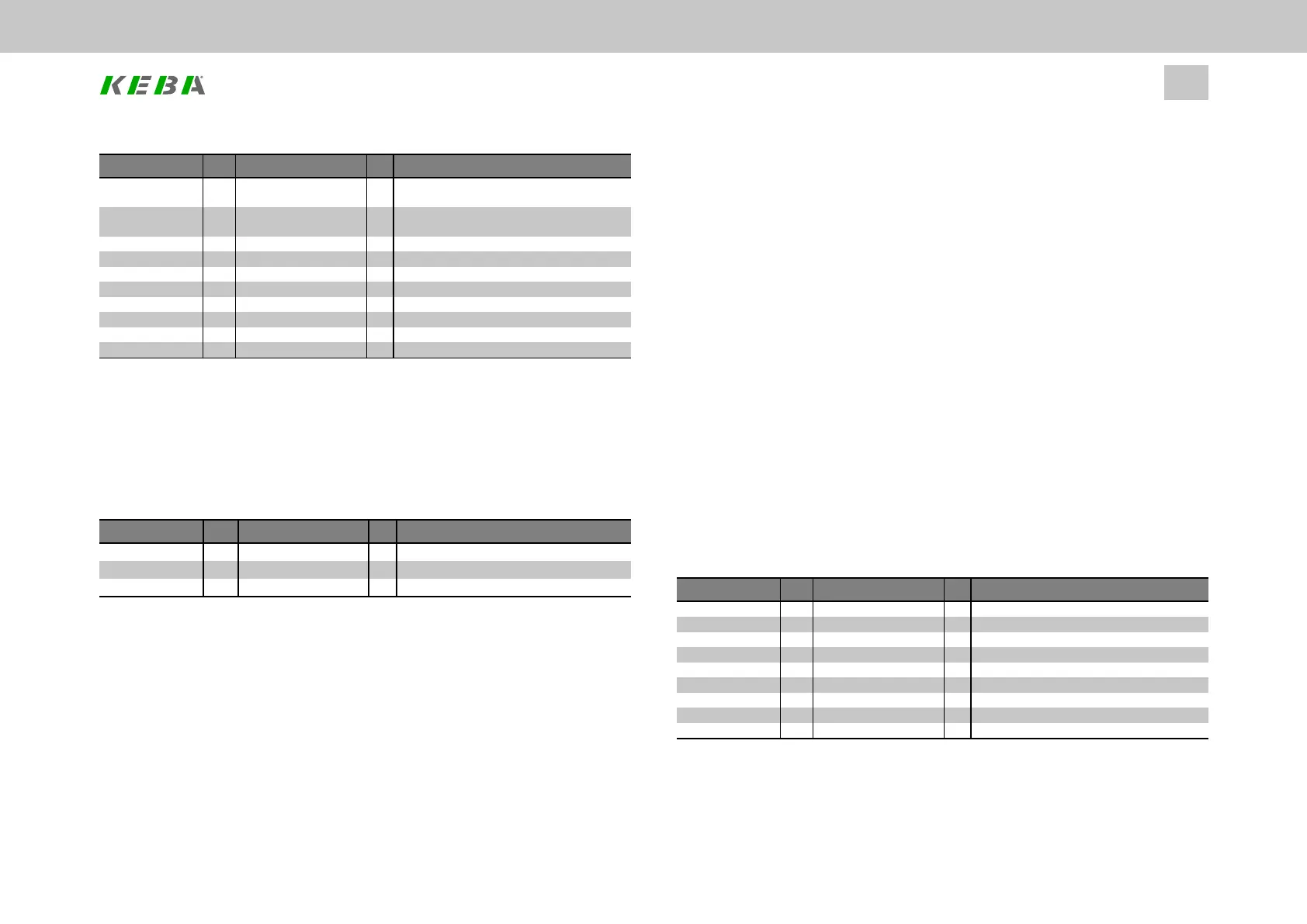
ID Index Name Unit Description
471 0 MOT_Lsig mH Motorleakageinductance(ASM)/stator
inductance(PSM)
472 MOT_LsigDiff q-axisstatorinductancevariation(relativeto
MOT_Lsig)
472 0 Lsig_q@I0 % Inductance@CurrentI0
472 1 Lsig_q@I1 % Inductance@CurrentI1
472 2 Lsig_q@I2 % Inductance@CurrentI2
472 3 Lsig_q@I3 % Inductance@CurrentI3
472 4 CurrentI0 % CurrentI0relativetoMOT_CNom
472 5 CurrentI1 % CurrentI1relativetoMOT_CNom
472 6 CurrentI2 % CurrentI2relativetoMOT_CNom
472 7 CurrentI3 % CurrentI3relativetoMOT_CNom
Table 7.6: “Advanced torque control - Saturation characteristic” parameters
7.3.6.1.2K-Tcharacteristic
In the overload range the output-side torque is reduced due to rising losses
(iron/copper losses). This behaviour can be compensated by P479[0] - MOT_
TorqueSat.
P No. Index Parameter name Unit Function
479 MOT_TorqueSat Motortorqueasafunctionofthecurrent
0to4 Nm Torque;interpolationpoints0to4.
5to9 A Current;interpolationpoints5to9.
Table 7.7: “K-T characteristic” parameters
7.3.6.2Currentobserver
In the current control circuit, the calculation of voltage setpoints and PWM runtime
appears as dead time. This is the main factor determining the possible performance
of current control. The current observer eliminates this dead time to the greatest
possible extent by predicting current by means of a scanning step. In addition, many
synchronous servomotors exhibit harmonic components in the current control circuit.
The current observer suppresses these harmonic components so that they cannot
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
129
7 Control
be passed on to the current controller. The disadvantage of the current observer is a
possible deviation between actual current and observed current. This can lead to an
overcurrent shutdown if the maximum current of the device or motor is controlled
stepwise.
The current observer is activated by P 433[0] - CON_CCON_ObsMode = TIME.
Adjust the time constant P 434[0] - Tf in the range from 0.062ms to 0.5ms. The
higher the time constant, the greater the smoothing effect of the observer – however,
the greater the possible deviations between actual current and observed current. On
the other hand, effects that do not correspond to the model are suppressed for the
control.
Another peripheral condition is that the electrical data of the motor must be well
defined.
l Synchronousmotors:seeSection"Synchronousmotoridentification(rotary
andlinear)"onpage46.
l Asynchronousmotor:seeSection"Asynchronousmotoridentification"on
page46.
Motor inductance (if necessary in connection with the saturation characteristic)
should be parameterised slightly too high.
ID Index Name Unit Description
433 0 CON_CCON_ObsMode Selectcurrentobservermode
434 CON_CCON_ObsPara Currentobserverparameters
434 0 TF ms Observertimeconstant
434 1 Kp 1/s Proportionalfeedbackgain
434 2 Tn ms Integralfeedbacktimeconstant
434 3 Decoup % Scaledecoupling
434 4 StatFF % Scalestaticvoltagefeed-forward
434 5 DynFF % Scaledynamicvoltagefeed-forward
434 6 FilterFF ms Filtervoltagefeed-forward
Table 7.8: “Advanced torque control - Observer” parameters