The software versions required to run the EnDat encoder interface are the standard
software versions for the ServoOne and ServoOnejunior.
NOTE
l PleasenotethelimitationsthatapplywhenrunningEnDatand
SSIencoders(seeSection"LimitingforEnDatandSSI"onpage
52).
When using linear encoders, P554[0] - ENC_CH1_DigitalResolution is used
instead of P543[0] - ENC_CH1_MultiT and P544[0] - ENC_CH1_SingleT (which
are used for rotary encoders). The values will be read from the EnDat encoder and
written to the aforementioned parameters.
l P 543[0] - ENC_CH1_MultiT
Thenumber"n"ofmultiturnbitsdefinesthemeasuringrangein2
n
incrementsperencodershaftrevolution;maximumtraveluntiloverflow;
maximumtravelwithinwhichtheabsolutevalueinitializationcanbe
unambiguous.Inthecaseofsingle-turnencoders,MultiT=0.
l P 544[0] - ENC_CH1_SingleT
Thenumber"n"ofsingle-turnbitscorrespondstotheencoder’sdigital
resolutionin2
n
incrementsperencodershaftrevolution.
l P 554[0] - ENC_CH1_DigitalResolution
Thisisthelengthofanincrement,innanometres,oftheencoder’sdigitally
transmittedpositionvalue.ThisvalueisreadfromtheEnDatlinearhead.
In the case of linear encoders, the number n of transmitted position bits from the
encoder will be found in SingleT only! 2
n
* DigitalResolution yields the maximum
travel in nanometres (for the encoder head).
P640 - ENC_ENDAT is intended for additional information, but is normally
not
needed. This parameter does not have a Ch1 or Ch3 prefix for the encoder channel
in the name, as it applies to both encoder channels. Although usually not needed,
the parameter is helpful or required in the following cases:
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
63
6 Encoder
1. Special EnDat encoder with diagnostics for evaluation
Inthiscase,thevaluationnumbersfromtheencoderarereadcyclicallyvia
additionalinformation.Onlythevaluationnumbersthattheencodersupports
willberead.Duringtheinitializationprocess,thesystemwillreadthe
encodertodeterminewhichvaluationnumbersitsupports.WhenP 640[0] -
ENDAT_Select=1,thefunctionwillbeenabledinthecontrollerandthe
internaldiagnosticsintheEnDaTencoderwillbeenabledaswell.The
EnDatencoderwillkeepthissettingevenafterbeingpoweredoff.To
explicitlydisabletheinternaldiagnosticsintheEnDatencoder,setP 640[0] -
ENDAT_Selectto2.
2. Evaluation of internal warnings
Inthisscenario,certaininternalwarningsfromtheencoderwillbereadfrom
theencoderviaadditionalinformation.Onlythewarningsthatboththe
encoderandtheServocontroller’ssoftwaresupportwillberead.Duringthe
initializationprocess,thesystemwillreadtheencodertodeterminewhich
warningsitsupports.WhenP 640[0] - ENDAT_Select=3,thefunctionwill
beenabledinthecontroller.
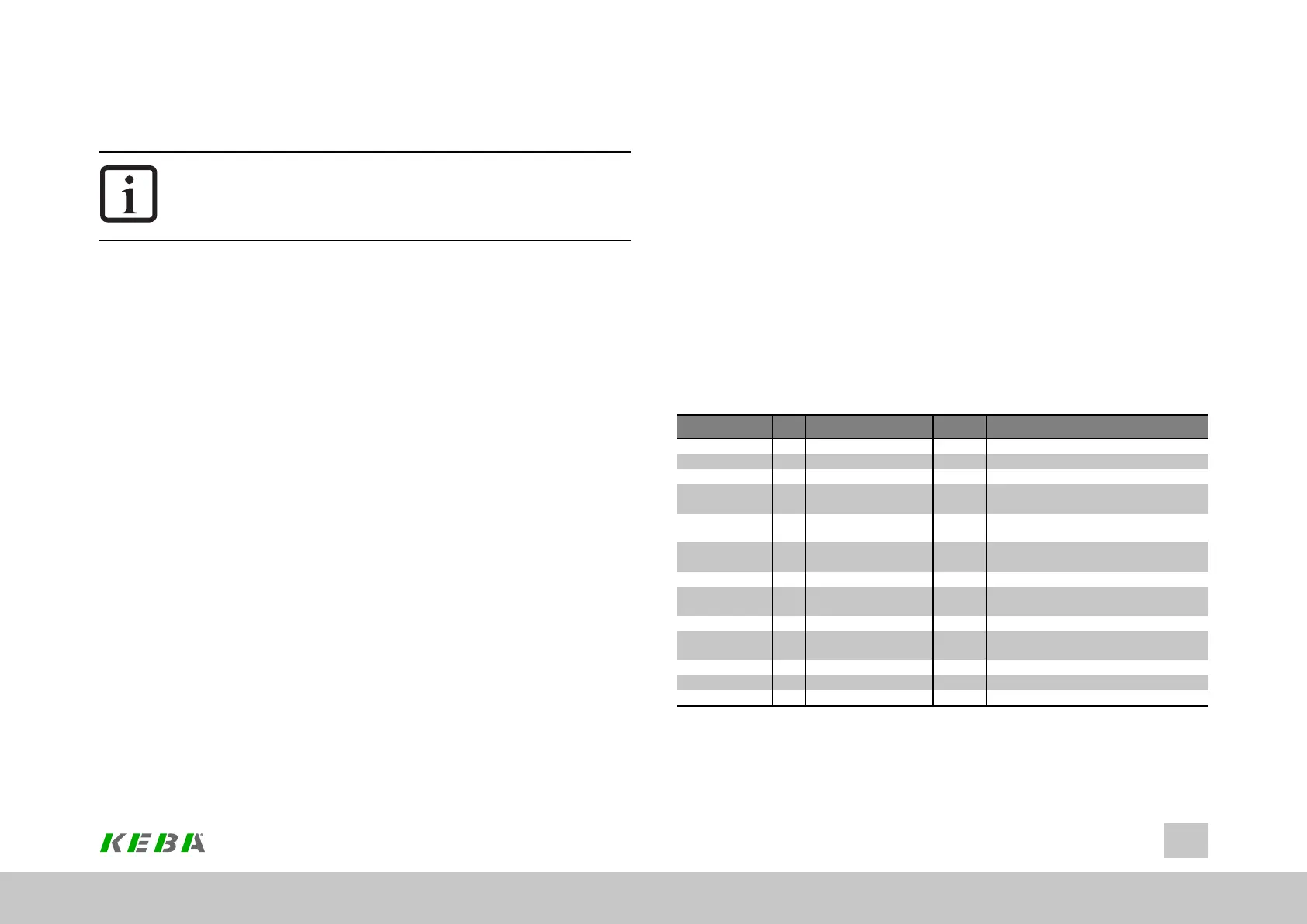
ID Index Name Unit Description
505 0 ENC_CH1_Sel=4 =ENDAT(4)
543 0 ENC_CH1_MultiT NumberofMultiTurnbits(absoluteencoder)
544 0 ENC_CH1_SingleT NumberofSingleTurnbits(absoluteencoder)
547 0 ENC_CH1_MTBase Definitionofpointofdiscontinuityinmulti-turn
range
548 0 ENC_CH1_MTEnable 1:UseMulti-turnencoderasasingle-turn
encoder
616 0 ENC_CH1_CycleCount Positionencodersamplingcycle(nx125
µsec)
598 0 ENC_CH1_Position inc Positionencoderchannel1
554 0 ENC_CH1_
DigitalResolution
nm Lengthofoneincrement(linearabsolute
encoder)
640 ENC_ENDAT EnDatadditional(additionalinformation)
640 0 ENDAT_Select 0=off EnDatfunctionselection,1/2=diagnosis
on/off,3=warnings,FF=lock
640 1 ENDAT_DiagCount u16 countnewdiagnosisblockheader
640 2 ENDAT_BWZ_1 lowbyte vn1:incrementaltrack
640 3 ENDAT_BWZ_3 lowbyte vn3:absolutetrack
Table 6.8: Channel 1 encoder configuration (X7) - EnDat parameters