component. The reason this is a special case is that the SSI clock will continue to be
cyclically output on the SSI clock lines, in contrast to the SSI(1) setting. This means
that the connected SSI encoder will continue to cyclically deliver position data on the
SSI data lines. However, once the SSI data is read once, the controller will not
evaluate any additional SSI data. -- This functionality can be used in the special
case if the 485 system is implemented as a bus system on the encoder side so that a
third 485 node (e.g. a controller) can “also listen in to” the SSI position data as an
SSI clock slave.
6.5.5.2.6EnDatabsolutevalueinterface
If P540[0] - ENC_CH1_Abs = ENDAT(2), the absolute EnDat encoder position will
be read once during the initialization phase; after this, the cyclical encoder position
will be acquired based on the SinCos incremental component.
The parameters for the EnDat interface are described in Section "EnDat
(cyclical)X7" on page 62, as are the differences in using the EnDat interface with the
“cyclical” method and “one-time reading” method.
6.5.5.2.7HIPERFACEabsolutevalueinterface
If P540[0] - ENC_CH1_Abs = HIPER(3), the absolute HIPERFACE encoder position
will be read once during the initialization phase; after this, the cyclical encoder
position will be acquired based on the SinCos incremental component. The
HIPERFACE interface will
not
be used as an alternative to cyclical encoder position
acquisition.
HIPERFACE functionality: After an SW reset is carried out from the HIPERFACE
encoder as the very first step, the ID byte, referred to as the “TypeKey”, will be read
from the encoder and interpreted: If it is equal to FFh, the data for Lines, MultiT and
SingleT will be read from the EN (HIPERFACE® electronic rating plate) on the
encoder. If it is not equal to FFh, the data for Lines, MultiT and SingleT will be taken
from a characteristic table in the controller firmware. In the case of linear encoder
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
69
6 Encoder
types, the corresponding parameters will be PeriodLen and DigitalResolution.
HIPERFACE encoders “unknown at the time of writing” (new: no entry in the
firmware characteristic table) are generally not supported! In the case of known
encoders, the Lines, MultiT, SingleT, PeriodLen and DigitalResolution parameters
will be overwritten with the determined values. After this, the HIPERFACE encoder’s
internal 4-byte error status memory will be read. Then, the position will be read once
from the encoder. If any errors that result in new entries in the internal error memory
occur at this point, the error memory will be read again and interpreted accordingly
(error message if applicable).
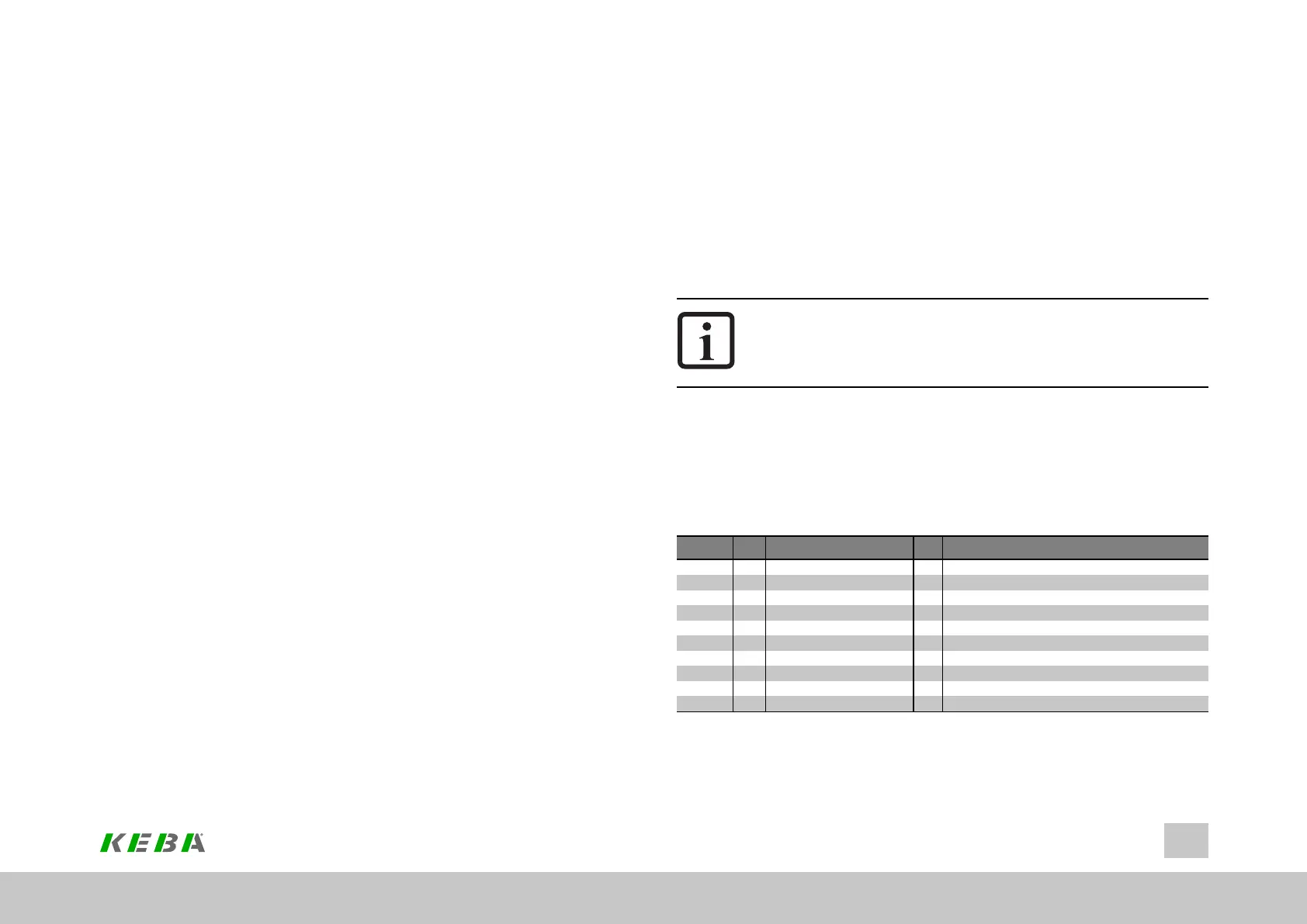
NOTE
l Payattentiontotheencoderinitializationentriesinthe
KeStudioDriveManager5messagewindow.Intheeventofan
error,alsochecktheentriesinP 552 - ENC_CH1_AbsEncStatus.
With P1900 - ENC_ETS, the HIPERFACE interface also supports what is referred to
as the “KEBA electronic rating plate.” If this parameter is set to SCAN(0), the motor’s
commutation offset will be read from the encoder’s OEM memory and copied to
P349 - CON_FM_MConOffset, but only if this offset can be unambiguously
identified in the encoder (encoder memory scanning). If the parameter is set to
NEVER(0) instead, this functionality will be disabled.
ID Index Name Unit Description
505 0 ENC_CH1_Sel=1 EncoderselectionsettoSINCOS(1)
540 0 ENC_CH1_Abs=3 HIPER(3)
542 0 ENC_CH1_lines NumberofLinesofSin/Cosencoder
543 0 ENC_CH1_MultiT NumberofMultiTurnbits(absoluteencoder)
544 0 ENC_CH1_SingleT NumberofSingleTurnbits(absoluteencoder)
552 0 ENC_CH1_AbsEncStatus Errorandstatuscodes(absoluteencoder)
553 0 ENC_CH1_PeriodLen nm Lengthofsignalperiod(Sin/Coslinearencoder)
554 0 ENC_CH1_DigitalResolution nm Lengthofoneincrement(linearabsoluteencoder)
555 0 ENC_CH1_Info Encoderinformation
1900 0 ENC_ETS ETSmode,electronicnameplate
Table 6.11: Parameters for Channel 1 (X7) - SinCos + HIPERFACE