n [rpm]
I [A]
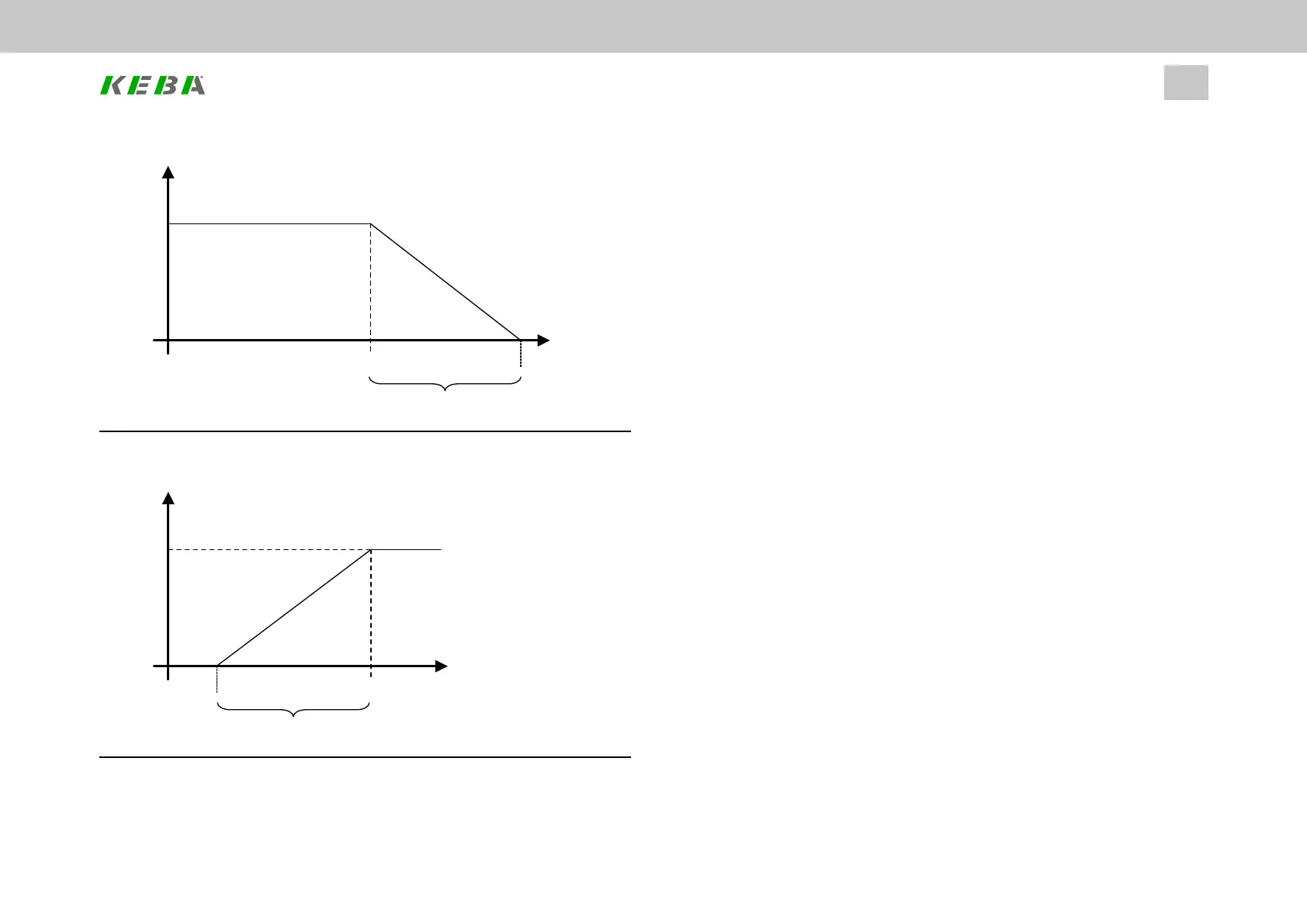
792[9]
792[7]
792[8]
0
Image 6.8: Parameter 792 diagram
Iq [A]
Id [A]
796[0]
796[1]
796[2]
0
Image 6.9: Parameter 796 diagram
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
96
6 Encoder
6.8.1.3Expandedspeedcontrolcircuit
There is the option of setting up an expanded speed control circuit when using
sensorless control. The reason for this is that the estimated speed from the Kalman
filter cannot be calculated with steady-state accuracy, as parameter inaccuracies are
inherent to the model.
Because of this, the speed from the angular derivative is used for “normal” speed
control. The angular change describes the difference between two predicted angular
positions from consecutive sampling steps. Dividing eps_diff by the observer’s
sampling time yields speed n_eps, which, although admittedly noisier than the
calculated Kalman filter speed, is accurate in a steady state. However, the heavy
noise means that relatively long filter times are required, resulting in the loss of some
of the control circuit’s dynamic performance.
In order to be able to use a control scheme with high dynamic performance and
steady-state accuracy, a circuit must be put together using two actual speed values
(the speed from the angular derivative [n_eps] and the speed from the Kalman filter
[n_kal]).